Точность gps позиционирования: испытания на точность и доступность позиционирования однокристального приёмника в сложных условиях эксплуатации
Системы глобального позиционирования и их совершенствование — Светич
Одной из основных составляющих технологии дифференцированного применения удобрений является система позиционирования, а основным элементом ее служит приемник сигналов GPS. Применение GPS позволяет товаропроизводителям точно, автоматизировано в реальном масштабе времени определять координаты при отборе проб, вносить удобрения на отдельные участки поля, составлять карты урожайности, определять границы поля, точное местоположение сорняков, вредителей растений, рельеф местности. В большинстве случаев достаточно знание координат на плоскости — х и у. Для более сложных операций может понадобиться знание и z- координаты.
Системы позиционирования можно в зависимости от требований к точности подразделить на 4 класса (таблица 1).
Таблица 1. Требования к точности систем позиционирования
|
|
|
|
|
| ||
|
|
| |
|
| ||
|
|
Спутниковые навигационные системы
В результате создания в конце 1980-х годов спутниковой навигационной системы (GPS- NAVSTAR в США и ГЛОНАСС — в России) в настоящее время военные и гражданские лица имеют свободный доступ к этой системе для определения координат своего местонахождения независимо от времени суток и природно-климатических условий. Наиболее широкое применение в точном земледелии получила система GPS [3, 4, 5].
Система позиционирования ГЛОНАСС пока используется ограниченным контингентом (в геодезии, картографии и т.д.). Система GPS модифицирована для позиционирования гражданских наземных, морских и воздушных транспортных средств, в том числе и объектов с.-х. назначения. На ранних стадиях разработки системы позиционирования характеризовались низкой надежностью для динамического позиционирования объектов в пределах поля. Разрешающая способность позиционирования мобильных агрегатов составляла 5 м и была явно недостаточной. Ошибка распределения Гаусса превышала 10 м. Малое количество спутников усугубляло эту проблему, при этом на точность позиционирования оказывали влияние деревья и здания. Существенно уменьшали точность позиционирования многократные отражения сигналов от самих объектов позиционирования. Приемники систем позиционирования были громоздкими и дорогими.
Сравнительные характеристики систем GPS- NAVSTAR и ГЛОНАСС представлены в таблице 2.
Таблица 2. Характеристики систем позиционирования GPS — NAVSTAR и ГЛОНАСС
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
*С преднамеренным искажением.
В 2000 г. GPS значительно повысила свою точность, а стоимость приёмников существенно снизилась. В настоящее время 12-канальный приемник GPS можно приобрести менее чем за 100$ США. Приемники GPS получают сигналы от 8 до 12 спутников, находящихся над горизонтом. Типичный пример приемника сигналов GPS — Trimble Ag.
Европейским Союзом финансируется Европейская навигационная спутниковая система (GNSS). Полнооперационное ее применение планируется в 2008 г. Эта система улучшит точность и надежность позиционирования по сравнению с GPS.
Каждая из систем GPS и ГЛОНАСС состоит из трех сегментов (рисунок 1).
-
Сегмент мониторинга и контроля. Он осуществляет всеобщий контроль и управление системой и принадлежит владельцу системы. -
Космический сегмент состоит из навигационных спутников (в настоящий момент их 24) с жизненным циклом около 7 лет, организованных в блоки одинаковой конфигурации и назначения. -
Сегмент пользователей на суше, море и околоземном пространстве с неограниченным числом приемников сигналов.
Рис. 1. Структура спутниковой навигационной системы
Местоположение приемников сигналов GPS или ГЛОНАСС определяется при помощи сигналов от не менее чем трех спутников. Координаты приемника сигналов определяются на основании информации о положении конкретного спутника и расстояния между спутниками и приемником сигналов.
Системы GPS или ГЛОНАСС дают погрешности, обусловленные атмосферными эффектами и пространственной конфигурацией спутников в данный момент времени [9, 10]. Кроме этого в системе GPS преднамеренно были внесены искажения сигналов для гражданских пользователей. В связи с этим точность позиционирования составляет ±100 м. Для повышения точности позиционирования используют дополнительный стационарный приемник сигналов с известными координатами (базовая станция DGPS).
Дополнительный приемник сигналов сравнивает сигналы GPS с известными координатами с целью определения величины погрешности. Учитывая, что та же погрешность имеет место и для приемников сигналов GPS с неизвестными координатами (искаженными), они могут быть легко исправлены.
Корректировка сигналов в реальном масштабе времени необходима при выполнении таких с.-х. работ, как внесение удобрений, применение химических средств защиты растений. Корректирующий сигнал передается со стационарной станции на движущийся объект (с.-х. машину или агрегат).
Спутниковый сегмент состоит из созвездия функционирующих в данную эпоху спутников. Сегмент управления и контроля содержит главную станцию управления и контроля, станции слежения за спутниками и станции закладки информации в бортовые компьютеры спутников. Сегмент пользователя — это совокупность спутниковых приемников, находящихся в распоряжении пользователей. Пользователя системы в первую очередь интересует его собственный сегмент, то есть имеющиеся у него приемники, а также спутниковый сегмент, в значительной мере обеспечивающий достоверность результатов. Вместе с тем действия сегмента управления и контроля иногда оказывают критическое влияние на полученные пользователем результаты. Пользователь не может контролировать систему и воздействовать на нее, но он обязан выявлять сбои в ее работе и на этапе обработки отсекать соответствующие результаты.
Спутниковый сегмент. Номинально в каждую эпоху имеется 24 работающих (здоровых — healthy) спутника системы. Спутники распределены по шести круговым орбитам. На каждой орбите, таким образом, находится 4 спутника. Плоскости орбит разнесены по прямому восхождению на 60º.
Наклон плоскости орбиты к плоскости экватора составляет 53 градуса. Именно таков угол наклона i на рисунке 2 для спутников GPS. Расстояние спутников от поверхности Земли составляет 20200 километров. При этом период обращения равен половине звездных суток. Наблюдателю это удобно. Если сегодня оказалось, что в такой-то интервал времени спутник занимал такое-то видимое с данного пункта положение, то завтра примерно в тот же интервал времени это повторится. Повторится и геометрия наблюдений, то есть PDOP. Следовательно, можно планировать наблюдения на несколько суток вперед с точностью до нескольких минут. Помешать этому может только резкая корректировка орбит спутников или переход какого-либо из них из состояния здорового в состояние больного (unhealthy) или наоборот.
Сегмент управления и контроля. Этот сегмент называют также операционной системой управления и контроля — Operational Control System (OCS). Основными задачами сегмента является слежение за спутниками для определения их орбит и поправок часов спутников относительно GPST, прогноз эфемерид спутников, временная синхронизация спутников, загрузка информационного сообщения на спутники. Существует также много других задач, таких, например, как обеспечение запусков новых спутников.
Сеть из пяти станций используют для создания широковещательных эфемерид и для определения параметров хода часов спутников. Именно эту информацию пользователь получает из спутникового сообщения. Более точную информацию, но с запаздыванием, получают из результатов наблюдений спутников на контрольных пунктах других сетей. Гораздо более глобальная и точная сеть — это Кооперативная международная сеть GPS — Cooperative International GPS Network (CIGNET), управляемая национальной геодезической службой (NGS) США. Координаты станций этой сети определены методом РСДБ. Полученные на этой сети эфемериды спутников называют точными. Они доступны, например, через INTERNET. Подчеркнем еще раз, что получить их можно только по прошествии некоторого времени после наблюдений. Следовательно, их используют, когда нужна наивысшая точность результатов, а задержка в их получении особой роли не играет.
Сегмент пользователя. Пользователь GPS — это человек или коллектив, имеющий в своем распоряжении всю необходимую для работы спутниковую аппаратуру. Следовательно, сегмент пользователя — это совокупность находящихся в работе спутниковых приемников и другой аппаратуры. Пользователи различаются на категории по нескольким признакам: гражданские и военные, навигаторы и геодезисты, имеющие полный допуск к системе и имеющие ограниченный допуск. Как правило, американские военные и представители американских спецслужб имеют полный доступ к системе. Таких пользователей называют авторизованными, допущенными, уполномоченными — authorized users. Остальные пользователи, как правило, гражданские, — это неавторизованные — unauthorized — пользователи. Аппаратура авторизованных пользователей позволяет получать и обрабатывать информацию такой точности, на которую только способна система. Аппаратура неавторизованных пользователей, не имея соответствующего чипа, способна получать только информацию с намеренно загрубленной точностью. Специалисты в области навигации как пользователи GPS заинтересованы в решении задач навигации. Эти задачи в значительной мере сводятся к определению координат транспортного средства и к определению скорости и направления его перемещения. Резко возрастают точностные требования, до дециметрового уровня, при подходе к портам, при маневрах в узкостях (проливы, фьорды) и в потоке движения. На самом деле навигационные приемники определяют не только местоположение и вектор скорости. Приемник указывает требуемый и реальный курс на заданный объект, отклонение от маршрута, предписывает маневры, желательные для возвращения на курс. Вообще навигационный приемник многофункционален.
Совершенствование систем глобального позиционирования
Для повышения эффективности применения систем глобального позиционирования ученые проводят исследования в направлении повышения точности определения координат, надежности, расширения сфер применения. Точность приемников сигналов GPS зависит от следующих факторов:
-
погрешности, обусловленной несовершенством спутниковых систем; -
состояния атмосферы; -
точности дифференцированного сигнала в случае DGPS.
Проводятся исследования по расширению сферы применения GPS, универсализации, снижению стоимости. Точность определения координат с помощью GPS зависит от цены приемника. Она изменяется от 100 до 10000 $ США. Дешевые приемники (от 100 до 500 $ США) могут быть использованы для определения координат размещения сорняков. Точность таких приемников около 10-15 м по горизонтали. Цена приемников, используемых для дифференцированного внесения удобрений, обеспечения стыковки смежных проходов, может меняться от 1500 до 5000 $ США.
Ведутся исследования по использованию приемников GPS для вождения агрегатов для внесения удобрений и применения средств защиты растений по заданному курсу. Установлено, что GPS обеспечивает более надежную стыковку смежных проходов. Если при использовании пенных маркеров около 10% площади остается неудобренной или переудобренной, то при использовании GPS только 5%. При вождении агрегата опытным оператором погрешность составляет около 1,5%. Имеется и много других преимуществ нового способа вождения (способность выполнять операции в ночное время, вождение машин-удобрителей с центробежными дисками, осуществление подкормки посевов).
Г. И. Личман, д. т. н., зав. лаб. (ГНУ ВИМ)
А.И. Беленков д. с.-х. н, профессор, РГАУ-МСХА имени К.А. Тимирязева
Журнал «Нивы Зауралья» №10 (121), ноябрь 2014
RTKLib – Сантиметровая точность GPS/ГЛОНАСС в пост-обработке / Хабр
Здравствуйте!
К сожалению, я не нашел на Хабре упоминаний о замечательной библиотеке для обработки сырых измерений – RTKLib. В связи с этим рискнул написать немного о том, как с её помощью можно получить сантиметры в относительной навигации.
Цель простая – обратить внимание общественности.
Сам я только недавно начал работать с этой библиотекой и был поражен её возможностями для простых смертных. В интернете достаточно много информации о практических примерах, но хотелось попробовать самому — и вот результат.
Итак, процесс в общем виде выглядит следующим образом:
Допустим, у нас есть два ГЛОНАСС/GPS приемника, с которых мы умеем получать сырые измерения (raw data). Сырыми они называются потому, что являются первичным материалом для обработки – псевдодальности, доплер, фазовые измерения…
С помощью утилиты STRSVR из состава библиотеки RTKLib нам необходимо записать два потока данных – один от базовой станции, которая будет неподвижно стоять, и второй – от ровера, который планируем перемещать. Запись от базы желательно стартовать заранее, минут за 10-15 до записи ровера.
В моем случае база находилась на крыше здания, а с ровером выходил на улицу. Для записи использовал два ноутбука.
1) Настраиваем Input – Serial обоих ноутах, это поток от GNSS приемника.
2) Output – File, это будет у нас файл сырых измерений.
3) Пускаем базу на запись – Start и неторопливо идем на открытую местность.
Для небольшой демонстрации распечатал лист А4 с буквой H, которую хотел обвести антенной, точнее основанием под установку на штатив. Антенна TW3440 производства Канадской компании Tallysman с заказной подстилающей поверхностью 30х30 см.
4) Располагаемся на мостовой, ставим ровер на запись и пытаемся медленно обвести буковку. Хоть на ровере стоит частота выдачи 5Гц, лучше уж все сделать тщательно.
5) По окончанию обводки сворачиваемся и идем смотреть что получилось.
6) Скидываем оба файла на один компьютер и приступаем к обработке.
7) Первое – надо из сырых данных получить стандартные RINEX файлы. В этом нам поможет RTKCONV:
8) Указываем путь к файлу с сырыми данными, а так же папку, куда программа поместит RINEX, формат сырых данных, в моем случае это NVS BINR и в настройках ставим галочки GPS и GLO, остальное можно не трогать.
9) Жмем Convert и получаем файлы для ровера и потом для базы, лучше их расположить в соответствующих папках Base и Rover.
10) Далее самое интересное – пост-обработка. Открываем утилиту RTKPOST.
11) Жмем Options, вкладка Settings 1, в настройке режима указываем Kinematic для обработки относительных измерений. Ставим галочки GPS и GLO, можно потом поиграться с настройками.
12) Вкладка Output – можно выставить формат выходных данных, например NMEA.
13) Важный момент – вкладка Positions, тут надо указать координаты базовой станции, либо взять их из заголовка, либо путем усреднения за период записи. Чем точнее знаем координаты базы тем точнее будут абсолютные координаты ровера.
Для примера укажем RINEX Header Position – взять из заголовка файла.
14) Нажимаем ОК и переходим в основное окно, там в поле Rover указываем путь к RINEX файлу ровера, ну и для базы путь к соответствующему файлу. Нажимаем Execute и ждем результат. После обработки можем посмотреть результат, нажав на Plot.
15) Внизу из рисунка видно, что решений с сантиметровой точностью получено 97.3%, остальное — это плавающее решение, точность которого значительно хуже.
На этом пока все.
Если кому будет интересно, могу написать как реализовать RTK режим.
Так же неплохо бы узнать ваше мнение: в каких не очевидных приложениях можно использовать решения с сантиметровой навигацией?
После апгрейда точность GPS составит 60–90 см / Хабр
Система GPS состоит из 24 спутников, и все они уже находятся на орбите довольно длительное время (были запущены с 1990 по 1997 гг). Пришло время для апгрейда. В ближайшее время все аппараты нынешнего стандарта GPS будут заменены на более новую версию GPS IIF, которая имеет ряд преимуществ, в том числе они более устойчивы к джаммингу (теперь нужны глушилки в 100 раз мощнее).
Но главное, что GPS IIF обеспечивает гораздо более высокую точность определения координат. Если нынешние спутники обеспечивают погрешность 6 метров, то новые спутники будут способны определять местоположение, как ожидается, с точностью не более 60–90 см. Если такая точность будет не только для военных, но и для гражданских применений, то это приятная новость для пользователей Foursquare и владельцев GPS-навигаторов.
Более того, такое повышение точности GPS означает, что становится возможным использовать спутниковые координаты для программных приложений нового класса, таких как дополненная реальность.
В данный момент на орбиту выведен пока только один спутник GPS IIF SV-1, который работает в полноценном режиме с 27 августа 2010 года. Второй спутник SV-2 запустят в текущем году.
Всего первоначальный контракт предусматривал запуск 33 спутников GPS нового поколения, но потом из-за технических проблем начало запуска перенесли с 2006 года на 2010 год, а количество спутников уменьшили с 33 до 12. Все они будут выведены на орбиту в ближайшее время.
Повышенная точность спутников GPS нового поколения стала возможной благодаря использованию более точных атомных часов. Поскольку спутники перемещаются со скоростью около 14000 км/ч, повышение точности времени даже в шестом знаке является критически важным для триангуляции.
Этот текст распространяется на условиях лицензии «Creative Commons Attribution 3.0 Unported». Вы можете копировать, редактировать и использовать в коммерческих целях этот текст при обязательном указании авторства.
Принцип и схема работы системы спутниковой навигации GPS
Спутниковая навигация GPS давно уже является стандартом для создания систем позиционирования и активно применяется в различных трекерах и навигаторах. В проектах Arduino GPS интегрируется с помощью различных модулей, не требующих знания теоретических основ. Но настоящему инженеру должно быть интересно разобраться со принципом и схемой работы GPS, чтобы лучше понимать возможности и ограничения этой технологии.
Схема работы GPS
GPS – это спутниковая навигационная система, разработанная Министерством обороны США, которая определяет точные координаты и время. Работает в любой точке Земли в любых погодных условиях. GPS состоит из трех частей – спутников, станций на Земле и приемников сигнала.
История GPS
 Идея создания спутниковой навигационной системы зародилась еще в 50-е годы прошлого столетия. Американская группа ученых, наблюдающая за запуском советских спутников, заметила, что при приближении спутника частота сигнала увеличивается и уменьшается при его отдалении. Это позволило понять, что возможно измерить положение и скорость спутника, зная свои координаты на Земле, и наоборот. Огромную роль в развитии навигационной системы сыграл запуск спутников на низкую околоземную орбиту. А в 1973 году была создана программа «DNSS» («NavStar»), по этой программе спутники запускались на среднюю околоземную орбиту. Название GPS программа получила в том же 1973 году.
Идея создания спутниковой навигационной системы зародилась еще в 50-е годы прошлого столетия. Американская группа ученых, наблюдающая за запуском советских спутников, заметила, что при приближении спутника частота сигнала увеличивается и уменьшается при его отдалении. Это позволило понять, что возможно измерить положение и скорость спутника, зная свои координаты на Земле, и наоборот. Огромную роль в развитии навигационной системы сыграл запуск спутников на низкую околоземную орбиту. А в 1973 году была создана программа «DNSS» («NavStar»), по этой программе спутники запускались на среднюю околоземную орбиту. Название GPS программа получила в том же 1973 году.
Система GPS на данный момент используется не только в военной области, но и в гражданских целях. Сфер применения GPS много:
- Мобильная связь;
- Тектоника плит – происходит слежение за колебаниями плит;
- Определение сейсмической активности;
- Спутниковое отслеживание транспорта – можно проводить мониторинг за положением, скоростью транспорта и контролировать их движение;
- Геодезия – определение точных границ земельных участков;
- Картография;
- Навигация;
- Игры, геотегинт и прочие развлекательные области.
Важнейшим недостатком системы можно считать невозможность получения сигнала при определенных условиях. Рабочие частоты GPS лежат в дециметровом диапазоне волн. Это приводит к тому, что уровень сигнала может снизиться из-за высокой облачности, плотной листвы деревьев. Радиоисточники, глушилки, а в редких случаях даже магнитные бури также могут мешать нормальной передаче сигнала. Точность определения данных будет ухудшаться в приполярных районах, так как спутники невысоко поднимаются над Землей.
Навигация без GPS
 Основным конкурентом GPS является российская система ГЛОНАСС (глобальная навигационная спутниковая система). Свою полноценную работу система начала с 2010 года, попытки активно использовать ее предпринимались с 1995 года. Существует несколько отличий между двумя системами:
Основным конкурентом GPS является российская система ГЛОНАСС (глобальная навигационная спутниковая система). Свою полноценную работу система начала с 2010 года, попытки активно использовать ее предпринимались с 1995 года. Существует несколько отличий между двумя системами:
- Разные кодировки – американцы используют CDMA, для российской системы используется FDMA;
- Разные габариты устройств – ГЛОНАСС использует более сложную модель, поэтому повышается энергопотребление и размеры устройств;
- Расстановка и движение спутников на орбите – российская система обеспечивает более широкий охват территории и более точное определение координат и времени.
- Срок службы спутников – американские спутники делаются более качественными, поэтому они служат дольше.
Помимо ГЛОНАСС и GPS существуют и другие менее популярные навигационные системы – европейский Galileo и китайский Beidou.
Описание GPS
Принцип работы GPS
Работает система GPS следующим образом – приемник сигнала измеряет задержку распространения сигнала от спутника до приемника. Из полученного сигнала приемник получает данные о местонахождении спутника. Для определения расстояния от спутника до приемника задержка сигнала умножается на скорость света.
 С точки зрения геометрии работу навигационной системы можно проиллюстрировать так: несколько сфер, в середине которых находятся спутники, пересекаются и в них находится пользователь. Радиус каждой из сфер соответственно равен расстоянию до этого видимого спутника. Сигналы от трех спутников позволяют получить данные о широте и долготе, четвертый спутник дает информацию о высоте объекта над поверхностью. Полученные значения можно свести в систему уравнений, из которых можно найти координату пользователя. Таким образом, для получения точного местоположения необходимо провести 4 измерения дальностей до спутника (если исключить неправдоподобные результаты, достаточно трех измерений).
С точки зрения геометрии работу навигационной системы можно проиллюстрировать так: несколько сфер, в середине которых находятся спутники, пересекаются и в них находится пользователь. Радиус каждой из сфер соответственно равен расстоянию до этого видимого спутника. Сигналы от трех спутников позволяют получить данные о широте и долготе, четвертый спутник дает информацию о высоте объекта над поверхностью. Полученные значения можно свести в систему уравнений, из которых можно найти координату пользователя. Таким образом, для получения точного местоположения необходимо провести 4 измерения дальностей до спутника (если исключить неправдоподобные результаты, достаточно трех измерений).

Поправки в полученные уравнения вносит расхождение между расчетным и фактическим положением спутника. Погрешность, которая возникает в результате этого, называется эфемеридной и составляет от 1 до 5 метров. Также свой вклад вносят интерференция, атмосферное давление, влажность, температура, влияние ионосферы и атмосферы. Суммарно совокупность всех ошибок может довести погрешность до 100 метров. Некоторые ошибки можно устранить математически.
Чтобы уменьшить все погрешности, используют дифференциальный режим GPS. В нем приемник получает по радиоканалу все необходимые поправки к координатам от базовой станции. Итоговая точность измерения достигает 1-5 метров. При дифференциальном режиме существует 2 метода корректировки полученных данных – это коррекция самих координат и коррекция навигационных параметров. Первый метод использовать неудобно, так как все пользователи должны работать по одним и тем же спутникам. Во втором случае значительно увеличивается сложность самой аппаратуры для определения местоположения.
Существует новый класс систем, который увеличивает точность измерения до 1 см. Огромное влияние на точность оказывает угол между направлениями на спутники. При большом угле местоположение будет определяться с большей точностью.
Точность измерения может быть искусственно снижена Министерством обороны США. Для этого на устройствах навигации устанавливается специальный режим S/A – ограниченный доступ. Режим разработан в военных целях, чтобы не дать противнику преимущества в определении точных координат. С мая 2000 года режим ограниченного доступа был отменен.
Все источники ошибок можно разделить на несколько групп:
- Погрешность в вычислении орбит;
- Ошибки, связанные с приемником;
- Ошибки, связанные с многократным отражением сигнала от препятствий;
- Ионосфера, тропосферные задержки сигнала;
- Геометрия расположения спутников.
Основные характеристики
В систему GPS входит 24 искусственных спутника Земли, сеть наземных станций слежения и навигационные приемники. Станции наблюдения требуются для определения и контроля параметров орбит, вычисления баллистических характеристик, регулировка отклонения от траекторий движения, контроль аппаратуры на бору космических аппаратов.
Характеристики навигационных систем GPS:
- Количество спутников – 26, 21 основной, 5 запасных;
- Количество орбитальных плоскостей – 6;
- Высота орбиты – 20000 км;
- Срок эксплуатации спутников – 7,5 лет;
- Рабочие частоты – L1=1575,42 МГц; L2=12275,6МГц, мощность 50 Вт и 8 Вт соответственно;
- Надежность навигационного определения – 95%.
Навигационные приемники бывают нескольких типов – портативные, стационарные и авиационные. Приемники также характеризуются рядом параметров:
- Количество каналов – в современных приемников используется от 12 до 20 каналов;
- Тип антенны;
- Наличие картографической поддержки;
- Тип дисплея;
- Дополнительные функции;
- Различные технические характеристики – материалы, прочность, защита от влаги, чувствительность, объем памяти и другие.
Принцип действия самого навигатора – в первую очередь устройство пытается связаться с навигационным спутником. Как только связь будет установлена, происходит передача альманаха, то есть информации об орбитах спутников, находящихся в рамках одной навигационной системы. Связи с одним только спутником недостаточно для получения точного местоположения, поэтому оставшиеся спутники передают навигатору свои эфемериды, необходимые для определения отклонений, коэффициентов возмущения и других параметров.
Холодный, теплый и горячий старт GPS навигатора
Включив навигатор впервые или после долгого перерыва, начинается долгое ожидание для получения данных. Долгое время ожидания связано с тем, что в памяти навигатора отсутствуют либо устарели альманах и эфемериды, поэтому устройство должно выполнить ряд действий по получению или обновлению данных. Время ожидания, или так называемое время холодного старта, зависит от различных показателей – качество приемника, состояние атмосферы, шумы, количество спутников в зоне видимости.
Чтобы начать свою работу, навигатор должен:
- Найти спутник и установить с ним связь;
- Получить альманах и сохранить его в памяти;
- Получить эфемериды от спутника и сохранить их;
- Найти еще три спутника и установить с ними связь, получить от них эфемериды;
- Вычислить координаты при помощи эфемерид и местоположения спутников.
Только пройдя весь этот цикл, устройство начнет работать. Такой запуск и называется холодным стартом.
Горячий старт значительно отличается от холодного. В памяти навигатора уже имеется актуальный на данный момент альманах и эфемериды. Данные для альманаха действительны в течение 30 дней, эфемерид – в течение 30 минут. Из этого следует, что устройство выключалось на непродолжительное время. При горячем старте алгоритм будет проще – устройство устанавливает связь со спутником, при необходимости обновляет эфемериды и вычисляет местоположение.
Существует теплый старт – в этом случае альманах является актуальным, а эфемериды нужно обновить. Времени на это затрачивается немного больше, чем на горячий старт, но значительно меньше, чем на холодный.
Ограничения на покупку и использование самодельных модулей GPS
Российское законодательство требует от производителей уменьшать точность определения приемников. Работать с незагрубленной точностью может производиться только при наличии у пользователя специализированной лицензии.
 Под запретом в Российской Федерации находятся специальные технические средства, предназначенные для негласного получения информации (СТС НПИ). К таковым относятся GPS трекеры, которые используются для негласного контроля над перемещением транспорта и прочих объектов. Основной признак незаконного технического средства – его скрытность. Поэтому перед приобретением устройства нужно внимательно изучить его характеристики, внешний вид, на наличие скрытых функций, а также просмотреть необходимые сертификаты соответствия.
Под запретом в Российской Федерации находятся специальные технические средства, предназначенные для негласного получения информации (СТС НПИ). К таковым относятся GPS трекеры, которые используются для негласного контроля над перемещением транспорта и прочих объектов. Основной признак незаконного технического средства – его скрытность. Поэтому перед приобретением устройства нужно внимательно изучить его характеристики, внешний вид, на наличие скрытых функций, а также просмотреть необходимые сертификаты соответствия.
Также важно, в каком виде продается устройство. В разобранном виде прибор может не относиться к СТС НПИ. Но при сборе готовое устройство уже может относиться к запрещенным.
какие бывают системы, параметры и функции / Блог компании Promwad / Хабр
В этой статье мы расскажем про глобальные системы позиционирования, разработанные в США, России, ЕС и Китае; объясним, как поддержка технологий глобальной спутниковой навигации реализована в электронных устройствах, а также опишем ключевые и дополнительные функции современных навигационных приемников.
GPS
Система GPS (Global Positioning System) создавалась для применения в военных целях. Она начала работать в конце 80-х — начале 90-х годов, однако до 2000 года искусственные ограничения на определение местоположения существенно сдерживали ее возможности использования в гражданских целях.
После отмены ограничений на точность определения координат ошибка снизилась со 100 до 20 м (в последних поколениях GPS-приёмников при идеальных условиях ошибка не превышает 2 м). Такие условия позволили использовать систему для широкого круга общих и специальных задач:
- Определение точного местоположения
- Навигация, движение по маршруту с привязкой к карте на основании реального местоположения
- Синхронизация времени
Орбиты спутников системы GPS. Пример видимости спутников из одной из точек на поверхности Земли. Visible sat — это число спутников, видимых над горизонтом наблюдателя в идеальных условиях (чистое поле).
ГЛОНАСС
Российский аналог GPS — ГЛОНАСС (глобальная навигационная спутниковая система) — была развёрнута в 1995 году, но в связи с недостаточным финансированием и малым сроком службы спутников она не получила широкого распространения. Вторым рождением системы можно считать 2001 год, когда была принята целевая программа ее развития, благодаря которой ГЛОНАСС возобновил полноценную работу в 2010 году.
Сегодня на орбите работают 24 спутника ГЛОНАСС, они охватывают навигационным сигналом весь земной шар.
Новейшие потребительские устройства используют GPS и ГЛОНАСС как взаимодополняющие системы, подключаясь к ближайшим найденным спутникам, это значительно увеличивает скорость и точность их работы.
Пример: aвтомобильное GPS/ГЛОНАСС-навигационно-связное устройство на базе ОС Android, разработанное командой Promwad по заказу российского конструкторского бюро. Реализована поддержка GSM/GPRS/3G. Устройство автоматически обновляет информацию о дорожной обстановке в режиме реального времени и предлагает водителю оптимальный маршрут с учётом загруженности дорог.
Сейчас на стадии разработки находятся еще две спутниковые системы: европейская Galileo и китайская Compass.
Galileo
Галилео — совместный проект Европейского союза и Европейского космического агентства, анонсированный в 2002 году. Изначально рассчитывали, что уже в 2010 году в рамках этой системы на средней околоземной орбите будут работать 30 спутников. Но этот план не был реализован. Сейчас предположительной датой начала эксплуатации Galileo считается 2014 год. Однако ожидается, что полнофункциональное использование системы начнется не ранее 2020 года.
Compass
Это следующая ступень развития китайской региональной навигационной системы Beidou, которая была введена в эксплуатацию после запуска 10 спутников в конце 2011 года. Сейчас она обеспечивает покрытие в границах Азии и Тихоокеанского региона, но, как ожидается, к 2020 году система станет глобальной.
Сравнение орбит спутниковых навигационных систем GPS, ГЛОНАСС, Galileo и Compass (средняя околоземная орбита — MEO) с орбитами Международной космической станции (МКС), телескопа Хаббл и серии спутников Иридиум (Iridium) на низкой орбите, а также геостационарной орбиты и номинального размера Земли.
Поддержка ГНСС
Поддержка технологи глобальных навигационных спутниковых систем (ГНСС) в электронных устройствах реализуется на базе навигационных приемников, которые могут быть выполнены в различных вариантах:
- Smart Antenna — модуль, состоящий из керамической антенны и навигационного приемника. Преимущества: компактность, не требует согласования, удешевляет разработку за счет сокращения сроков.
- MCM (Multi Chip Module) — чип, включающий все компоненты навигационного приемника.
- OEM — экранированная плата, включающая ВЧ интерфейсный процессор и процессор частот основной полосы (RF-frontend + baseband), SAW-фильтры и обвязку. Это наиболее популярное решение на данный момент.
Навигационный модуль подключается к микроконтроллеру или системе на кристалле по интерфейсу UART/RS-232 или USB.
Ключевые параметры навигационных приемников
Прежде чем навигационный приемник сможет выдавать информацию о местоположении, он должен обладать тремя наборами данных:
- Сигналы от спутников
- Альманах — информация о приблизительных параметрах орбит всех спутников, а также данные для калибровки часов и характеристики ионосферы
- Эфемериды — точные параметров орбит и часов каждого спутника
Характеристика TTFF показывает сколько времени требуется приемнику на поиск сигналов от спутников и определение местоположения. Если приёмник новый, или был выключен на протяжении длительного периода, или был перевезен на большое расстояние с момента последнего включения, время до получения набора необходимых данных и определения места увеличивается.
Производители приемников используют различные методы уменьшения TTFF, включая скачивание и сохранения альманаха и эфемерид по беспроводным сетям передачи данных (т.н. метод Assisted GPS или A-GPS), это быстрее чем извлечение этих данных из сигналов ГНСС.
Холодный старт описывает ситуацию, когда приемнику нужно получение всей информации для определения места. Это может занять до 12 минут.
Теплый старт описывает ситуацию, когда у приемника есть почти вся необходимая информация в памяти, и он определит место в течении минуты.
Одним из ключевых параметров навигационных модулей в мобильных устройствах является энергопотребление. В зависимости от режима работы модуль потребляет различное количество энергии. Фаза поиска спутников (TTFF) характеризуется большим, а слежение меньшим энергопотреблением. Также производители реализуют различные схемы уменьшения энергопотребления, например, путем периодического перевода модуля в режим сна.
Как правило, все модули выдают данные по текстовому протоколу NMEA-0183, но кроме указанного текстового протокола каждый производитель имеет свой собственный двоичный протокол (Binary), который позволяет изменять конфигурацию модуля под конкретное использование либо получать доступ к дополнительному функционалу, а также доступ к сырым измерениям. Двоичный протокол удобен для использования на микроконтроллерах, т.к. при этом нет необходимости выполнять преобразование из текста в двоичные данные, тем самым экономя программную память путем исключения библиотеки работы со строками и времени на преобразование.
Стандарт NMEA-2000 — это развитие протокола NMEA-0183. В качестве физического уровня в NMEA-2000 используется CAN-шина, которая была выбрана в виду большей защищенности по сравнению с RS-232. С точки зрения протокола передачи данныхNMEA-2000 существенно отличается от своего предшественника, т.к. использует двоичный протокол, базирующийся на стандарте SAE J1939.
Частота обновления данных о местоположении и скорости всех модулей составляет 1 Гц, но при необходимости ее можно поднять до 5 или 10 Гц.
В зависимости от области применения модуль можно сконфигурировать под определенные динамические характеристики, которые он должен отслеживать (например, максимальное ускорение объекта). Это позволяет использовать оптимальный алгоритм и улучшать качество измерений.
Для выполнения навигационной задачи модуль должен одновременно принимать сигналы от нескольких спутников, т.е. иметь несколько приемных каналов. На сегодняшний день это число лежит в диапазоне от 12 до 88.
Точность определения местоположения по GPS составляет в среднем 15 м, она обусловлена используемым неточным сигналом, влиянием атмосферы на распространение радиосигнала, качеством кварцевых генераторов в приемниках и пр. Но с помощью корректирующих методов возможно улучшить точность определения местоположения. Эта технология называется Differential GPS. Существует два метода коррекции: наземный и спутниковый DGPS.
В наземных методах коррекции наземные станции дифференциальных поправок постоянно сверяют свое заведомо известное местоположение и сигналы от навигационных спутников. На базе этой информации вычисляются корректирующие величины, которые могут быть переданы с помощью УКВ- или ДВ-передатчика на мобильные DGPS-приемники в формате RTCM. На основании полученной информации потребитель может корректировать процесс определения собственного местоположения. Точность этого метода составляет 1—3 метра и зависит от расстояния до передатчика корректирующей информации и качества сигнала.
Спутниковые методы, такие как система WAAS (Wide Area Augmentation System), доступная в Северной Америке, и система EGNOS (European Geostationary Navigation Overlay System), доступная в Европе, шлют корректирующие данные с геостационарных спутников, таким образом достигается большая область приема, чем при наземных методах.
Спутниковые системы дифференциальной коррекции (SBAS — Space Based Augmentation Systems) позволяют улучшить точность, надежность и доступность навигационной системы за счет интеграции внешних данных в процессе расчета
Демонстрация принципа работы системы WAAS (Wide Area Augmentation System) на территории США
Одним из основных параметров, влияющих на точность определения местоположения и стабильность приема является чувствительность. Она, как правило, определяется качеством малошумящего усилителя на входе приемника и сложностью реализованных алгоритмов цифровой обработки. Типовые значения современных приемников лежат в диапазоне 143 дБм для поиска и 160 дБм для слежения.
Кроме определения местоположения ГНСС предоставляют информацию о точном времени. Как правило, все приемники имеют выход PPS (pulse per second, импульсов в секунду) — секундная метка (1 Гц), которая точно синхронизирована с временной шкалой UTC.
Дополнительные функции навигационных устройств
Счисление пути. На основе информации о направлении движения и пройденном пути (предоставляется дополнительными датчиками) приемник может рассчитывать свои координаты при отсутствии сигналов от спутников (например, в туннелях, на подземных стоянках и в плотной городской застройке).
Некоторые модули имеют возможность напрямую подключать флэш-память (например, по SPI) к модулю для записи трека c необходимой периодичностью. Эта функция позволяет отказаться от использования отдельного микроконтроллера, либо она может быть полезной для минимизации энергопотребления (т.е. система на кристалле может находиться в состоянии сна).
На этом поверхностный обзор технологий глобальной спутниковой навигации завершен. Спасибо за внимание. Примеры реализованных проектов на базе этих ГЛОНАСС и GPS можно посмотреть на странице разработок компании Promwad.
Indoor «GPS» с точностью +-2см / Хабр
День добрый, коллеги!
Все началось с того, что мы, как и многие, тоже делали роботов — автономных, мобильных, с кучей сенсоров и огромным потенциалом. Вообще-то, мы все еще продолжаем их делать. Но в очередной раз столкнувшись с одной из ключевых задач роботов — определением своего положения в пространстве и навигацией в помещении — мы решили сфокусироваться на решении этой задачи. Вот, что из этого получилось.
Ролик ниже снят прямо на конференции Skolkovo Robotiсs 2015. Я просто установил стационарные маячки на колонны на первом этаже Гиперкуба (зеленые точки на карте), разбудил маячки, взял в руки мобильный маячок (голубая точка) и походил по этажу:
А так можно ходить с двумя маячками в руках:
Так выглядят сами маячки (и мобильные и стационарные):
![]()
Каждый день приносит какие-то улучшения в прошивке и софте. На данный момент максимальные расстояния между маяками — до 50 метров.
Спешу заметить, что точность — понятие очень тонкое и многозначное. Но с практической точки зрения имеет смысл отталкиваться от задач, чем мы и руководствовались. Например, роботу важно знать, где он находится; где находятся препятствия, которые он уже нашел; где путь, по которому он может пройти. Таким образом, когда скорость звука в воздухе меняется (температура, давление, влажность), изменяется измеренное расстояние и до маяков и до объектов. Карта как бы дышит. Но относительные расстояния никак не изменяются. Это позволяет роботу, как и раньше, находить препятствия, путь, двери и стены.
Почему же ультразвук?
Прежде чем остановить свой выбор на используемой схеме — активных ультразвуковых маяках с синхронизацией и обменом по радио и трилатерацией — мы глубоко прошлись по возможным вариантам определения положения робота в пространстве:
- Лидар:
— Точно. Красиво. Дорого. Если не дорого, то не очень удобно. Нужно сканировать. А скан — это механика. Это куда сложнее и сразу менее надежно и еще дороже. Но в целом это очень хороший датчик, если он подходит для задач и если уметь им управляться. И не нужны маяки. Можно сразу отправляться в путь в неизвестность. Как вариант — простейшие измерители расстояния на ИК сенсорах. Или более сложные — с постоянными лазерами или сканирующими лазерами и камерами. Тоже варианты. Но свои ограничения, подобные ограничениям лидаров. - Ultra-wide band (UWB):
— Очень круто. Скорее всего, рано или поздно будет хорошо работать. Подтянется полупроводниковая технология. Цены упадут. Как-то решится вопрос со стабильностью, фазовыми шумами, ограничением по спектральной плотности излучаемого сигнала в 41.3 dBm/MHz. Но пока как-то не очень получается заказать готовые компоненты. Они вот-вот где-то совсем близко, но как-то все еще ускользают. Но разработок много и они многообещающие. Ждем и внимаем. - Bluetooth and WiFi beacons
— Потенциально очень хорошие варианты для телефонов и для точности до нескольких метров, потому что не требуют ничего дополнительно, кроме того, что уже есть в телефоне. Вкупе с инерциальными системами внутри телефонов и другими дополнительными данными, скорее всего, достигнут точности меньше метра на практике. Каждый год в Барселоне на MWC показывают разработки — и каждый год очень интересно. Для того, чтобы вести человека в торговом центре к полке с товаром — очень недурно. Для робота, пожалуй, маловато. Ему нужны сантиметры, чтобы не сшибать стены и створки дверей. Плюс чаще всего нужна предварительная калибровка помещения, размещения. И, конечно, радио не требует прямой видимости — это большой плюс. Ну а для роботов, как минимум, нужен телефон или его начинка… Но по факту целый телефон может быть дешевле. - Одометрия
— Очень хорошая точность на малых расстояниях, пока нет препятствий, пока хорошее сцепление колес с полом. Один из основных источников информации для роботов. Но требует, время от времени, проверки текущего положения по дополнительному источнику данных, например, по Indoor «GPS». Без корректировки ошибка накапливается очень быстро и делает вычисление положения невозможным. Кроме того, одометрия хороша для вычисления положения робота относительно начальной точки робота. Но она ничего не говорит о положении робота в пространстве относительно прочих объектов — стен, коридоров, дверей. - Инерциальные системы
— Так же, как и с одометрией, можно получать очень хорошие результаты и очень быстро — с частотой десятки Гц. Но ошибка накапливается и требуется корректировка по каким-то другим источникам информации. Также, как и одометрия, инерциальные системы хороши для измерения относительного изменения положения. Начальное положение должно быть задано каким-то другим способом. - Оптические системы
— Сладкая мечта. Пока, не видел качественно работающих. Потенциал огромный. Но сложно и не надежно. А хочется просто и надежно. - Специальные оптические системы
— Есть красивые специальные варианты, когда робот определяет свое положение с помощью вертикально смотрящей камеры, идентифицируя яркие объекты, например, лампы, и позиционируясь по ним, как по звездам. Выглядит красиво. Не требует маяков. В некоторых случаях — отлично будет работать. - GPS
— Старый добрый GPS, к огромному сожалению, не работает, когда не видны спутники. Да и точность — метры. В общем, для роботов и помещений подходит не очень. - Магнитометрия
— Что-то очень изысканное. Для особых и специальных случаев. И, возможно, скорее, в качестве дополнительного источника данных. Кроме того, требует предварительной калибровки помещения и слишком подвержена влиянию собственных магнитов на роботе, например, от моторов или спикеров. - Прочее
— Есть много прочих изысканных вариантов. Например, можно оставлять невидимый след — печатать точки на полу, распылять химические вещества — оставлять метки. Это красиво. В некоторых случаях — удобно, надежно, и точно.
— Движение по линии — ну, как бы, не совсем то, что хотелось бы. Но в специальных случаях — очень даже просто и надежно.
— Усложненные варианты с оптическими метками, заранее установленных на стенах, потолках, объектах вокруг. Очень даже неплохой и относительно дешевый вариант для позиционирования именно в помещениях. Требует предварительной «разметки» территории. Но, если делать ее просто и автоматически или, даже, если позволить размечать территорию самому роботу, во время первых проездов территории, может оказаться очень дешевым и точным вариантом.
В общем, систем возможных оказалось много. Но учитывая наши цели и задачи роботов, а также ограничение по финансам, мы остановились на самом простом и самом недорогом работающем варианте с ультразвуком, который при простых решениях давал бы сантиметровую точность.
Результаты и следующие шаги
— Мы сделали систему навигации на основе ультразвуковых активных маяков, потому что этот подход работает уже сейчас и решает задачи, стоящие перед нашими и многими роботами. Среди пилотных клиентов — мобильные роботы из США, коптер команды испанских студентов, французский робот для развозки лекарств в госпитале и парочка российских рекламных роботов.
— Решает ли эта система все задачи навигации внутри помещения? Нет, не все. Например, когда прямая видимость на маяки затруднена или есть активные помехи в ультразвуке, система может показывать неоптимальные результаты. Но есть и решения — более частая установка маяков и использование ультразвуковых сенсоров для «чистых» диапазонов.
— Кроме того, по результатам Сколково, выяснилось, что «такое же, только на большее расстояние» нужно сразу нескольким другим типам роботов: чтобы парковаться на парковке; чтобы красиво убирать снег и не ломать чужие машины и стены. Так что мы поигрались немного и расширили радиус работы в ультразвуке до 50 метров и делаем вариант подходящего климатического исполнения.
— Оптимальное решение же для навигации — в использовании связки сразу нескольких систем, дополняющих друг друга. Конкретная комбинация зависит от стоящих перед роботом задач и существующих ограничений (точность, размеры, ток потребления, деньги, и так далее).
Точность ГЛОНАСС повысят в два раза до конца текущего года | Статьи
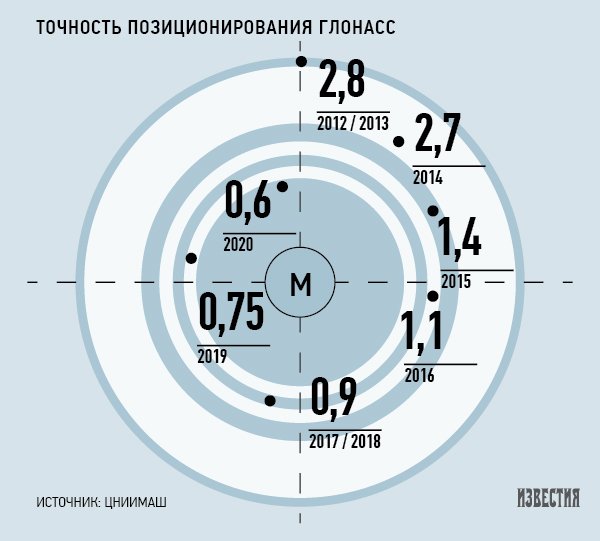
Предприятия Роскосмоса, участвующие в программе ГЛОНАСС, обещают улучшить точность определения координат с помощью системы ГЛОНАСС до 1,4 м уже к концу этого года — сейчас точность позиционирования в отечественной навигационной системе составляет 2,7 м. Прогноз повышения точности приведен в презентации начальника Информационно-аналитического центра координатно-временного и навигационного обеспечения ЦНИИмаша (есть в распоряжении «Известий»).
В ЦНИИмаше «Известиям» пояснили, что в настоящее время Роскосмос совместно с Минобороны России разрабатывают программу использования технических решений, заложенных в космических аппаратах серии «Глонасс-М», результатом которой и станет запланированное повышение точности.
— В частности, в компании «Российские космические системы» разработана бортовая аппаратура межспутниковых измерений и специальные наземные станции, которые в совокупности позволяют повысить оперативность закладки эфемеридно-временной информации на борт уже находящихся в космосе космических аппаратов, — пояснили в ЦНИИмаше. — Совместно с реализацией программы развития зарубежных станций ГЛОНАСС это позволит обеспечить повышение тактико-технических характеристик комплекса ГЛОНАСС.
По словам Николая Тестоедова, генерального директора и генерального конструктора компании «Информационные спутниковые системы им. академика М.Ф. Решетнёва» (производитель аппаратов ГЛОНАСС), сейчас закладка эфемерид (данных о местоположении спутника) на борт осуществляется каждые 12 часов.
— Закладка точных данных о местоположении спутника производится в момент, когда аппарат пролетает над территорией России, — объясняет Тестоедов. — Данные заложены, и дальше спутник летит 12 часов, в течение которых на него воздействуют множество факторов: солнечный ветер, влияние Луны, неравномерность земной поверхности и т.д. В спутнике заложена математическая модель, все эти факторы учитывающая, но всё равно за 12 часов аппарат накапливает определенное отклонение от теоретической траектории. Которое и дает погрешность определения координат. Если мы будем чаще закладывать на борт спутника точные эфемериды — не два, а четыре раза в сутки, — тогда погрешность ухода от идеальной траектории будет в два раза меньше. Именно это мы и планируем сделать, используя межспутниковые линии: мы загружаем эфемериды на спутник, летящий над Россией, и он по межспутниковой линии передает данные другим аппаратам. Тем самым мы повышаем частоту закладки эфемерид, что и дает основной вклад в повышение точности.
По словам Тестоедова, результаты работы, то есть существенное повышение точности, будут заметны ближе к концу года.
— GPS сегодня демонстрирует точность определения координат в районе 1 м. Разницу в точности между российской и американской системой мы всё время снижаем, — говорит Тестоедов. — Повышение точности, условно говоря, с 1 м до 0,5 м — это принципиально более сложная задача, чем повышение точности с 3 м до 1 м. Американцы тоже повышают точность GPS, но мы пока проходим тот отрезок пути, где понятными решениями можно снимать большие куски погрешности. Поэтому мы их и догоняем. Как только мы приблизимся к метровой точности, нам будет уже очень большой кровью даваться каждый новый сантиметр точности.
Целевые показатели «Поддержание, развитие и использование системы ГЛОНАСС на 2012–2020 годы» предусматривают повышение точности позиционирования до 60 см к 2020 году. По словам главы «ИСС имени Решетнёва», такой точности позволит достичь обновленная группировка спутников «Глонасс-К» с более точными бортовыми часами.
Атомные часы — сердце навигационного спутника. Его передатчики излучают сигнал, содержащий точное время и координаты аппарата в данный момент. Получив сигналы от нескольких навигационных спутников, чип в пользовательском приборе, будь то телефон или навигатор, высчитывает свои координаты. Чем более точные данные он получает, тем более аккуратно определяет координаты.
Насколько точен GPS на моем смартфоне? (Часть 1)
Исторически сбор данных на местах был сложной задачей, предназначенной для специалистов по географической информации (ГИС) и технически подкованных специалистов. Это было в значительной степени связано с кривой обучения, связанной с эксплуатацией приемников глобальной системы позиционирования (GPS) картографического уровня. Однако смартфоны и планшеты изменили это. Они предлагают удивительный набор функций в портативном, интуитивно понятном и все более знакомом интерфейсе.Подумайте обо всех технологиях, заключенных в одном из этих маленьких устройств:
- GPS
- Камера
- Сетевое подключение (3G, 4G, WiFi…)
- Электронная почта
- Интернет
- приложений
Они на самом деле лучше, чем трикодеры, которые мы видели на StarTrek! Они имеют более тонкий профиль, вероятно, весят намного меньше, имеют сенсорные экраны, дисплеи большего размера и могут использоваться с тысячами доступных приложений.
IPhone
в сравнении с Tricorder
Один большой вопрос при выборе смартфонов или планшетов для сбора данных на местах: « Насколько они точны? ». Необходимо ответить на связанный вопрос:« Какая точность будет соответствовать потребностям моего проекта? ”Вам необходимо ответить на оба этих вопроса, чтобы определить, подойдет ли вам эта технология.Обычно точность GPS геодезического класса (менее метра или сантиметра) не требуется для составления карт общественного здравоохранения. Достижения в пределах 10 метров более чем достаточно, чтобы нанести на карту расположение учреждений, адреса пациентов, потенциальные источники заболеваний или благополучие.
Как работает GPS?
Система глобального позиционирования (GPS) — это система Министерства обороны США (DOD). Он использует созвездие из 24 спутников, вращающихся вокруг Земли на высоте 12 000 миль. Устройства GPS вычисляют ваше местоположение, определяя расстояние между приемником GPS и как минимум 4 спутниками GPS.Спутники передают радиосигналы на приемники GPS, что позволяет производить расчеты. Изначально GPS создавалась как военная система наведения, и я сомневаюсь, что кто-то предвидел популярное использование ее сегодня.
iPhone был оснащен встроенным GPS с момента выхода iPhone 3, и телефоны Android стали поддерживать GPS примерно в то же время. Обычно люди используют GPS для поиска ресторанов и улиц. Однако нет причин, по которым эти же устройства нельзя использовать для сбора данных о здоровье населения!
Подробнее о службах поиска смартфонов
Смартфоны на самом деле используют больше, чем GPS, чтобы найти вас.Они используют гибридную локационную систему, объединяющую три отдельные технологии:
- Система GPS с поддержкой (A-GPS)
- Определение местоположения WiFi
- Позиционирование в сотовой сети.
Эти три технологии используются в комбинации, поскольку они доступны. A-GPS является наиболее точным из трех, а определение местоположения по сотовой сети — наименее точным. На рисунке ниже показан пример точности каждой из этих служб определения местоположения.
Зандберген, П. А. (2009).Точность местоположения iphone: сравнение а) вспомогательного GPS, б) Wi-Fi и в) сотового позиционирования. Труды в ГИС, 13, 5–25.
Точность GPS
Существует ряд факторов, влияющих на точность независимо от того, какой GPS-приемник используется. Радиосигналы GPS попадают в разные условия во время движения в атмосфере, вызывая задержки сигнала и, следовательно, влияя на точность. Геометрия используемых спутников также будет отличаться. GPS будет иметь более широкий набор спутников на выбор, если вы находитесь посреди большого поля, а не на 6-й авеню на Манхэттене.Вы получите лучшую позицию, если спутники, на которые вы привязаны, не будут сгруппированы в одной части неба. Следовательно, чем больше у вас будет обзора неба, тем точнее будет ваш GPS. Помимо блокировки обзора неба, городские каньоны также могут вызывать эффекты многолучевого распространения, когда сигнал GPS отражается от зданий или других объектов, что снижает точность.
Во второй части я рассмотрю каждую из трех частей гибридной системы локации по отдельности и обсудю, какой именно точности вы можете ожидать.
Нравится:
Нравится Загрузка …
Связанные
.
Как добиться 1-метровой точности в Android: GPS World
Недавние изменения в оборудовании и стандартах делают возможной точность до 1 метра, в некоторых случаях уже в этом году. Стенограмма выступления, проведенного для разработчиков Android в начале этого года, в этой статье дается краткий обзор местоположения в смартфонах, представлена технология и стандарты времени двусторонней передачи Wi-Fi, а затем объясняются программные интерфейсы приложений Wi-Fi.
Авторы: Фрэнк ван Диггелен, Рой Вант и Вей Ван, Android Location, Google

Изображение: GPS World; outdoor, Андрей Соловьев / Shutterstock.ком; для помещений, Rade Kovac / Shutterstock.com
Сейчас отличное время для приложений определения местоположения, поскольку стандарты технологического оборудования и интерфейсы прикладного программирования (API) Android развиваются одновременно, чтобы обеспечить повышенную точность определения местоположения, которая ранее была невозможна при использовании смартфонов.
В конечном итоге это означает высокую точность для всех, но мы хотим погрузить вас в подробности определения местоположения, потому что мы хотим дать вам возможность получить фору в будущем.Мы также хотим подчеркнуть необходимость защиты и уважения пользователя. Чем больше людей используют местоположение, тем более осторожными должны быть мы и вы. Мы выделим, где вы должны получить разрешения пользователей, и закроем некоторые рекомендации по созданию приложений для удобного определения местоположения.
Где мы находимся сегодня с точностью определения местоположения внутри помещений? Если вы заметили, что ваш телефон кажется более точным, когда вы находитесь внутри торговых центров и офисных зданий, чем это было несколько лет назад, вы не представляете этого. С каждым выпуском объединенного поставщика данных о местоположении мы постоянно улучшаем алгоритмы Android и машинное обучение для местоположений Wi-Fi.
Продолжаются улучшения, и вы увидите точность в помещении выше 10 метров, но время приема-передачи (RTT) — это технология, которая выведет нас на уровень одного метра.
А как насчет GPS? Что касается точности GPS на открытом небе, за последние несколько лет не произошло больших изменений. Если вы находитесь на улице и видите открытое небо, точность GPS с вашего телефона составляет около пяти метров, и какое-то время она остается постоянной. Но благодаря необработанным измерениям GNSS с телефонов это теперь можно улучшить, а с изменениями в оборудовании спутников и приемников улучшения могут быть значительными.
Все знакомы с синей точкой, но чтобы получить синюю точку, вам нужен провайдер местоположения, а для определения местоположения вам нужны измерения — в частности, измерения дальности от точек доступа Wi-Fi или со спутников GPS. Мы покажем вам, как на смартфонах можно обеспечить точность измерения до одного метра. Ключевыми технологиями являются Wi-Fi RTT, двухчастотный GPS и измерение фазы несущей.
Если вы хотите подождать год или два, это найдет свое применение во всемирной экосистеме и API-интерфейсе слитного местоположения Android, но мы хотим дать вам шанс на 1-2 года за счет проведения точных измерений и превращая их в точное местоположение.Мы хотим работать с вами, чтобы ускорить разработку и приблизить настоящее к будущему.
Вы можете спросить, зачем мне вообще нужна повышенная точность определения местоположения? Давайте рассмотрим два случая, когда существующие приложения могли бы использовать гораздо более высокую точность определения местоположения.
Для внутренней прокладки маршрута или навигации, к которой вы привыкли в своих автомобилях, вам нужна гораздо лучшая точность, чем на улице: вам нужна точность до одного метра, потому что внутренние элементы, такие как кубы или проходы, имеют ширину всего несколько метров.Даже для самых любимых приложений на открытом воздухе, таких как карты маршрутов и поиск альтернативных маршрутов в пробках, мы могли бы получить более высокую точность, чем сейчас.
Например, когда вы приехали сюда сегодня утром на машине, вы, вероятно, рассчитали время вашего прибытия, используя среднюю скорость движения. Что вам действительно нужно, так это скорость движения на полосе, в которой вы находитесь, чтобы вы могли спросить, насколько быстрее было бы, если бы я вместо этого выбрал полосу для машин? Конечно, есть много других вариантов использования, и мы упомянем некоторые из них.Но важно то, что мы уверены, что у вас будет намного больше идей, чем у нас, и в этом прелесть открытой экосистемы Android.
Время приема-передачи Wi-Fi
Wi-Fi RTT для определения дальности и определения местоположения в помещении основывается на измерении времени прохождения радиочастотных сигналов и может использоваться для оценки вашего местоположения в помещении с точностью до одного-двух метров.
Прежде чем мы углубимся в подробности Wi-Fi RTT, мы хотим рассказать вам, как мы в настоящее время рассчитываем местоположение внутри помещения.В настоящее время мы используем индикатор уровня принимаемого сигнала Wi-Fi (RSSI). По сути, мы можем рассчитать расстояние как функцию от силы сигнала. На Рисунке 1 с точкой доступа в центре показана тепловая карта мощности сигнала вокруг точки доступа Wi-Fi (AP).

Рис. 1. Индикация уровня принимаемого сигнала Wi-Fi (RSSI) при неизотропном распространении сигнала. (Изображение: Франк ван Диггелен, Рой Уант и Вэй Ван )

Рисунок 2. Принципы работы Wi-Fi RTT, основная концепция.(Изображение: Франк ван Диггелен, Рой Уант и Вэй Ван )

Рисунок 3. Принципы работы Wi-Fi RTT на практике. (Изображение: авторы)
Зеленый — самый сильный сигнал рядом с точкой доступа, а красный — самый слабый по краям. Я поместил два телефона на эту диаграмму на переходе между слабым и сильным. Обратите внимание, что телефон справа находится дальше от точки доступа, чем телефон слева. Таким образом, мощность сигнала может изменяться на одном и том же расстоянии, что, к сожалению, затрудняет выполнение точных измерений дальности на основе этого типа измерения.Есть множество алгоритмов и приемов, которые можно использовать для улучшения этого, но наибольшего улучшения можно достичь с помощью новой технологии Wi-Fi.
Вот где в игру вступает Wi-Fi RTT. Вместо силы сигнала используется время пролета. Он измеряет время, необходимое для отправки радиочастотного пакета Wi-Fi от точки доступа на телефон и обратно. Поскольку радиосигналы распространяются с той же скоростью, что и видимый свет, если мы умножим общее время прохождения пакета Wi-Fi в оба конца на скорость света и разделим на два, мы получим расстояние и, следовательно, расстояние от телефона до точка доступа.Это основной принцип.
Если вы хотите использовать несколько диапазонов до ближайших точек доступа для расчета своего местоположения, мы должны использовать процесс, называемый множественной задержкой. Ключевым моментом здесь является то, что чем больше у вас диапазонов, тем точнее вы можете оценить позицию. Если вы можете использовать по крайней мере четыре диапазона, то мы думаем, что вы можете достичь точности определения местоположения примерно от одного до двух метров в большинстве зданий.
Почему мы рассказываем вам о Wi-Fi RTT сегодня? Почему не в прошлом году или раньше? Потому что 2018 год — это год Wi-Fi RTT в Android.Мы выпускаем общедоступный API в Android P на основе протокола дальности IEEE 802.11mc. Кроме того, мы также интегрируем аспекты этого протокола в провайдер объединенного местоположения, который является основным API местоположения, который разработчики используют для добавления синей точки на карту. Таким образом, в ближайшем будущем, когда рядом с телефоном будут находиться точки доступа RTT, расчетная точность определения местоположения будет выше.
История. Стандарт 802.11 был ратифицирован в декабре 2016 года, а в начале 2017 года Wi-Fi Alliance запустил программу взаимодействия для поставщиков микросхем, чтобы убедиться, что чипы соответствуют протоколу.Именно тогда мы начали много работать, чтобы проверить его работу и понять, как его можно интегрировать в Android. К осени этого года мы выпустим общедоступный API, чтобы вы все имели доступ к этой возможности и могли создавать свои собственные приложения на основе этой технологии.
Принципы работы Wi-Fi RTT
Процесс ранжирования начинается со стандартного сканирования Wi-Fi. Телефон обнаруживает точки доступа, которые находятся поблизости, и на основе определенных битов в информационных элементах (IE), содержащихся в маяках Wi-Fi, и тестовых ответах, мы можем выяснить, какие из этих точек доступа поддерживают RTT, а телефон может выбрать один из них для диапазона.Он начинается с запроса к точке доступа; в результате точка доступа в ответ запустит протокол пинг-понга. Пинг, отправленный на телефон, называется пакетом точного измерения времени (FTM), а отправленный обратно в точку доступа понг является подтверждением этого пакета.
Отметки времени прибытия и отправления записываются на каждом конце транзакции, но для того, чтобы телефон мог рассчитать общее время приема-передачи, он должен иметь все четыре из этих времен. Таким образом, точка доступа отправляет на телефон еще один пакет, и это третье сообщение содержит пропущенные времена.Затем телефон просто вычисляет время приема-передачи, вычитая временные метки из точки доступа и вычитая собственные временные метки обработки пакетов. Разница между этими временами оставляет только время пролета пакета. Мы умножаем это на скорость света, чтобы получить расстояние, и делим на два, чтобы получить диапазон, который мы пытаемся измерить.
Оказывается, если вы выполните этот процесс несколько раз, вы на самом деле получите большую точность, и это то, что протокол позволяет, обеспечивая пачку пакетов FTM.Обычно мы выполняем пакет из восьми таких транзакций, и, как следствие, система может рассчитывать статистику ранжирования, такую как среднее значение и дисперсия. Это позволяет нам более точно отображать позицию на карте, а знание точности также позволяет нам более легко рассчитывать траекторию.
Теперь, когда у вас есть диапазоны, как вам получить позицию? Один из способов, аналогичных GPS-позиционированию, — это взять четыре диапазона до четырех отдельных точек доступа; если бы эти диапазоны были точными, они бы определяли четыре круга, которые пересекались бы в одной точке.На практике из-за ошибки в каждом диапазоне положение максимального правдоподобия вычисляется с использованием алгоритма мультилатерации наименьших квадратов.
Затем вы можете дополнительно уточнить это положение, повторяя процесс, в частности, по мере движения телефона, а затем вычислить траекторию с помощью методов фильтрации, таких как фильтрация Калмана, для оптимизации оценки.
Как и любая новая технология, здесь есть проблемы, и мы столкнулись с некоторыми из них на раннем этапе. Мы обнаружили, что иногда имеется постоянное смещение калибровки диапазона, которое может достигать полуметра.Иногда вы также видите эффекты многолучевого распространения, когда пакет принимается на пути вне прямой видимости от точки доступа к телефону, а не на пути прямой видимости, что увеличивает дальность действия. Поставщик может решить эту проблему, используя так называемое разнесение антенн, но все эти проблемы связаны с алгоритмами, которые производители улучшают.
По сути, нам нужно пройти своего рода процесс прорезывания, чтобы избавиться от этих ошибок, и Google может помочь в этом процессе, предоставив справочные платформы и справочные приложения.Затем поставщики могут откалибровать свои собственные платформы, прежде чем вы, ребята, даже начнете их использовать, что будет идеальной ситуацией.
Мы предполагали, что вы, как первые последователи, захотите начать использовать этот API, но, поскольку мы движемся в относительно недалеком будущем, мы ожидаем, что вы просто будете использовать Fused Location Provider, потому что мы собираемся интегрировать в него возможность RTT. , В настоящий момент Fused Location Provider использует GPS (если он доступен), уровень сигнала вышек сотовой связи и RSSI Wi-Fi, а также объединяет все это со встроенными датчиками: инерциальной навигацией с помощью акселерометра, гироскопа и компаса.Теперь мы добавляем в это сочетание Wi-Fi RTT, и это повысит точность Fused Location Provider всякий раз, когда поблизости есть точки доступа с поддержкой RTT.
Еще одна вещь, которую следует запомнить: если вы сами рассчитываете позицию Wi-Fi RTT, вам также необходимо знать положение точек доступа. В Fused Location Provider мы автоматически рассчитаем эти позиции для вас: мы соберем эти позиции из краудсорсинга, чтобы вам не о чем беспокоиться, и это значительно упростит вам жизнь при написании приложений.
API-интерфейсы RTT
Давайте рассмотрим API-интерфейсы RTT в P, чтобы увидеть, как можно добавить RTT в собственное приложение. Как мы уже упоминали, RTT измеряет время приема-передачи между двумя устройствами Wi-Fi, поэтому и ваш мобильный телефон, и точки доступа должны поддерживать протокол 802.11mc. Как вы видели, RTT может дать вам очень точные оценки местоположения с точностью до одного метра, поэтому ваше приложение должно объявить разрешение ACCESS_FINE_LOCATION. Конечно, на мобильном устройстве должны быть включены и сканирование местоположения, и сканирование Wi-Fi.
Как узнать, поддерживает ли ваш мобильный телефон RTT? В P мы добавили новую системную функцию под названием FEATURE_WIFI_RTT, чтобы вы могли просто проверить, возвращает ли это значение true на вашем мобильном устройстве. Наши пиксельные телефоны с P DP2 и выше будут поддерживать RTT. Как узнать, поддерживают ли ваши точки доступа RTT? Как обычно, вам нужно будет выполнить сканирование Wi-Fi и получить список результатов сканирования Wi-Fi. Затем просмотрите результаты сканирования и проверьте для каждого результата сканирования, возвращает ли метод is80211mcRepsonder () значение true.Это скажет вам, поддерживают ли точки доступа RTT.
После того, как вы получите список AP с поддержкой RTT, просто добавьте их в ScanRequest Builder для создания запроса на сканирование. RTT выполняется WiFiRTTManager, к которому вы можете получить доступ, получив системную службу WIFI_RTT_RANGING_SERVICE. Теперь мы готовы начать ранжирование RTT, отправив RTT-запрос в RTTManager с обратным вызовом результата ранжирования. Обычно RTT занимает всего несколько сотен миллисекунд, и когда он завершится, вы получите список информации, включая статус — RTT может не работать, MAC-адрес — какую точку доступа вы только что назначили, и, что наиболее важно, расстояние между мобильный телефон и точка доступа.
Вот список информации, которую вы можете получить из результатов измерения дальности RTT: расстояние, стандартное отклонение расстояния, которое является стандартным отклонением для нескольких диапазонов в нескольких FTM, а также количество выполненных измерений FTM и количество успешных измерений. Отношение успешных измерений к предпринятым измерениям даст вам представление о том, насколько хороша среда Wi-Fi для определения дальности RTT.
Мы упомянули, что все устройства Pixel поддерживают RTT. Как насчет точек доступа? Мы начинаем видеть точки доступа, поддерживающие протокол 11mc в производстве.Мы также очень рады сообщить вам, что Google Wi-Fi скоро будет поддерживать протокол 11mc. К концу этого года в стандартном Google Wi-Fi по умолчанию будет включен RTT. Во всем мире мы также начинаем видеть развертывание точек доступа RTT. Южная Корея фактически возглавляет развертывание точек доступа RTT.
Конечно, это только начало долгого пути. Мы очень хотим увидеть в ближайшие годы более высокий уровень проникновения RTT AP.

Рисунок 4. Интеграция RTT с местоположением Android.(Изображение: Франк ван Диггелен, Рой Уант и Вэй Ван )
GPS и природа
Точность фазы несущей используется в коммерческих GPS-приемниках с 1980-х годов. Новым является доступность этих измерений фазы несущей с телефонов и двухчастотных измерений на телефонах. Прямо сейчас все ваши смартфоны, все смартфоны повсюду имеют GPS или GNSS только в одном частотном диапазоне. Он известен как L1. Но в городе появилась новая частота под названием L5, и она поддерживается всеми этими системами GNSS: GPS, Galileo, BeiDou QZSS и IRNSS.Наличие второй частоты означает, что вы получите гораздо более быструю сходимость к точности фазы несущей.
А как насчет оборудования? В последние несколько месяцев несколько компаний, производящих потребительские чипы GPS, объявили о доступности двухчастотных чипов L1 / L5 GPS как для автомобильного рынка, так и для рынка телефонов. Эти микросхемы сейчас разрабатываются для автомобилей и телефонов.
Давайте поговорим о самих измерениях и API. Телефон должен поддерживать API измерений GNSS.Вашему приложению потребуется разрешение ACCESS_FINE_LOCATION, а местоположение должно быть включено.
Как узнать, поддерживает ли конкретный телефон эти измерения? На высоком уровне вы можете просто перейти на поддерживаемый нами веб-сайт g.co/GNSSTools как часть сайта разработчиков Android. В таблице перечислены телефоны, которые поддерживают измерения GNSS, а также их характеристики. Он сообщит вам, какие телефоны поддерживают измерения, а какие — измерения фазы несущей.
Программно вы делаете это следующим образом: вы вызываете метод onStatusChanged , и он возвращает целое число, которое сообщает вам возможности телефона, либо если телефон просто не поддерживает измерения вообще, либо если он поддерживает его, но местоположение выключен, или если он поддерживает это и местоположение включено; в таком случае, тебе хорошо.
Давайте подробнее рассмотрим API. Наиболее подходящими для того, о чем мы здесь говорим, являются следующие три метода:
- getConstellationType () сообщает вам, к какому из различных созвездий GNSS принадлежит конкретный спутник.
- getCarrierFrequencyHz () сообщает вам, находитесь ли вы в диапазоне L1 или L5 для конкретного сигнала.
Главное,
- getAccumulatedDeltaRangeMeters () сообщает, как далеко на этой несущей волне приемник отслеживал вас с момента начала отслеживания сигнала.
Нам нужно еще кое-что объяснить, а именно рабочий цикл. Прямо сейчас, когда вы путешествуете по телефону и видите движущуюся синюю точку, вы можете подумать, что GPS включен постоянно.На самом деле это не так. В телефоне происходит то, что GPS по умолчанию включается на долю секунды, затем отключается на оставшуюся долю секунды, а затем повторяется. Это для экономии заряда батареи. Вы чувствуете, что GPS включен все время, потому что синяя точка будет непрерывно перемещаться, но на самом деле это внутренний цикл.
Для этой обработки фазы несущей вы должны постоянно отслеживать несущую волну, потому что несущая волна подобна тонко градуированной линейке или рулетке без цифр.Так что, если GPS был включен и приемник измеряется ваша фаза, и вы получите данные от базовой станции, вы бы начать обработку. Если затем GPS отключится на долю секунды, вы потеряете, где были. Он начнется снова, вы снова приобретете, у вас будет другая фаза повторного приобретения, вы начнете снова — ну, вы никогда не решите проблему. Вам нужна рулетка, чтобы оставаться снаружи, и вам нужно обрабатывать, а для этого вам нужно отключить рабочий цикл. Вы можете сделать это в Android P с опцией разработчика.
Подробная информация об API. На рисунках 5 и 6 представлены снимки экрана приложения, которое мы выпустили под названием GNSS Logger. Это позволяет вам регистрировать необработанные измерения в телефоне. Самое приятное в этом приложении — это эталонное приложение: его исходный код открыт и доступен на Github, поэтому при создании приложения используйте наш код.

Рисунок 5. Снимок экрана GNSS Logger. (Изображение: Фрэнк ван Диггелен, Рой Уант и Вэй Ван)

Рисунок 6.Пример кода для получения необработанных измерений GNSS. (Изображение: Фрэнк ван Диггелен, Рой Уант и Вэй Ван)
Когда вы создаете приложение, которое требует необработанных измерений, вам понадобится API диспетчера местоположения Android с методом registerGnssMeasurementsCallback . Этот метод требует, чтобы вы передали ему обратный вызов GnssMeasurementsEvent , показанный здесь. Вы создаете этот обратный вызов, а затем переопределяете метод onStatusChanged, и это даст вам целочисленный статус, который мы обсуждали, чтобы сообщить вам, поддерживаются ли измерения.
Если это так, вы затем переопределите метод onGnssMeasurements Received , и это позволит вам получать GnssMeasurementEvent каждую эпоху, например каждую секунду. Это событие дает вам значения, о которых мы говорили: тип созвездия, несущая частота и накопленный диапазон дельты. Для дежурного цикла это опция разработчика, поэтому вы получаете доступ к нему через страницу разработчика на своем телефоне, как вы видите на P. Это позволяет вам отключить дежурный цикл.
Имейте в виду, что это представляет собой компромисс между непрерывными измерениями и сроком службы батареи. Это скажется на сроке службы батареи. Сколько? Что ж, даже когда GPS включен постоянно, он будет использовать менее 20% энергии, которую использует экран, так что вы можете почувствовать величину. Это вариант для разработчиков именно потому, что это компромисс, связанный с временем автономной работы, и мы очень обеспокоены максимальным сроком службы аккумулятора, но если вы и наша команда вместе сможете доказать, что этот вариант имеет ценность и люди этого хотят, тогда он будет быть обновленным до полностью поддерживаемого API в будущем.
На рис. 7 показана базовая архитектура, которую мы ожидаем, если вы реализуете приложение с высокой точностью. Внизу блок-схемы слева вы видите чип GPS / GNSS. Измерения GNSS передаются через API, которые мы только что описали, а затем ваше приложение находится на вершине прикладного уровня. Вы собираетесь должны иметь доступ к справочной сети, чтобы получить данные о том, что опорные станции слежения. Существуют общедоступные справочные сети. Я перечислил один внизу: Международная служба GNSS.Вы можете получить от них данные бесплатно.

Рисунок 7. Приложения для высокоточного GPS. (Изображение: Франк ван Диггелен, Рой Вант и Вэй Ван )
Затем вам нужно обработать эти данные в какой-то библиотеке позиций, которая выполняет всю обработку фазы несущей, и это тоже доступно в виде открытого исходного кода. RTKLib.com имеет пакет с открытым исходным кодом для точного позиционирования. Тогда тебе хорошо.
Мы упоминали, что двойная частота дает вам гораздо более быструю сходимость с высокой точностью, но вам не нужно ждать, пока выйдут двухчастотные телефоны.Вы можете начать делать это с одночастотных телефонов. Вот пример того, кто это уже сделал. Это приложение создано Французским космическим агентством, и они делают именно то, что мы показываем на блок-схеме слева, и они достигают субметровой точности через несколько минут схождения.
Вот еще один внешний анализ, который был проведен аналогичным образом. Это из статьи под названием «Позиционирование с помощью Android GNSS». Здесь используется один из тех чипов, которые мы вам показали, чип, который используется в сотовых телефонах с двумя частотами.Здесь показаны совокупные результаты по разным запускам GPS, и вы видите, что в большинстве случаев точность выше метра. Вы видите, что по вертикальной оси, которая составляет от 0 до 1 метра, точность достигает метра менее чем за одну минуту, а затем продолжает сходиться, пока телефон продолжает непрерывно отслеживать фазу несущей.
Вот еще одна похожая, но другая бумага. Здесь используется одна из микросхем, предназначенная для автомобилей.Это было проверено на машине, проезжавшей по этой трассе, и график здесь показывает точность после начального схождения во время движения автомобиля. Вы видите, что с одной только GNSS точность составляет от 1 до 2 метров, а с этой обработкой фазы несущей она составляет пару дециметров.
Что вам понадобится, чтобы построить это? Конечно, вам нужно включить определение местоположения устройства, и ваше приложение должно иметь разрешения на определение местоположения, так что это будет исходить от пользователя. Вам потребуются базовые измерения GNSS, которые доступны с Android N.Вам также понадобится эта непрерывная фаза несущей, о которой я говорил, и которая доступна в P с опцией разработчика. Было бы неплохо иметь две частоты для быстрой конвергенции, и это скоро появится. Вам нужна эталонная сеть, подобная той, которую мы уже упоминали; существуют также коммерческие справочные сети и коммерчески доступное программное обеспечение, чтобы делать то же самое, но мы рекомендуем вам начать с бесплатных вещей и идти дальше.
Наконец-то вы получили приложение.
Таким образом, все, что мы вам здесь показывали, основано на технологиях внутри и снаружи помещений, которые развиваются как бы параллельно.В каждом случае у нас есть новая технология, и Android P дает вам доступ к ней.
снова в помещении
Новая технология — это Wi-Fi RTT и точки доступа с возможностью двустороннего доступа. Мы предоставляем вам общедоступный API для доступа к этим измерениям, но вам нужна инфраструктура точки доступа. Именно здесь некоторые из вас могут продвинуться вперед в этом году, потому что, если у вас есть клиент, который владеет или контролирует заведение, он может обновить свои точки доступа — иногда просто обновление прошивки — и тогда у вас будет инфраструктура.Android P выходит позже в этом году, и вы можете что-то реализовать и использовать внутреннюю навигацию или создать любое другое контекстно-зависимое приложение.
Например, кто-то заходит в магазин: где молоко? Вы можете сделать мир лучше для всех нас, избавив нас от тирании спрашивать дорогу у незнакомцев. И если вы не один из тех, кто имеет доступ к этому сейчас, через несколько лет инфраструктура будет естественным образом развиваться, поскольку точки доступа будут обновлены до RTT, и 1-метровое местоположение будет автоматически доступно от Fused Location Provider.
Сейчас на улице
Для этого процесса несущей фазы это не только на открытом воздухе, но и на открытом воздухе под открытым небом. Что вам нужно? Двойная частота и непрерывная фаза несущей. Мы даем вам API и возможность разработчикам использовать это. Как мы уже упоминали, вам понадобится доступ к базовой станции, а затем и приложения.
Что можно делать на открытом воздухе под открытым небом? Мы уже упоминали пример трафика. Есть много других, которые легко приходят на ум, когда существующая точность GPS не снижает ее.Например, геокешинг, когда люди ищут сокровища; Было бы неплохо иметь точность до одного метра. Высокоточный спортивный мониторинг. Представьте себе сноубордистку, которая хочет очень точно измерить свои следы постфактум. Пятиметровое расположение — это мало. Один метр было бы здорово.
Говоря о спорте, появляется все больше и больше приложений для дронов, в которых у вас есть своего рода возможность «следовать за мной», и дрон будет летать и снимать вас. Было бы неплохо, если бы он снимал вас, а не человека рядом с вами.И так далее. Существуют сотни приложений, и вы, вероятно, думаете о некоторых прямо сейчас, и в этом весь смысл.
Мы хотим, чтобы вы написали эти приложения, и вместе мы приблизим дугу истории технологий к настоящему. Я действительно с нетерпением жду следующего года, чтобы увидеть вас здесь и посмотреть, что вы создали.
Наконец, мы хотим оставить вам пару указателей. Когда вы создаете приложения для определения местоположения, пожалуйста, создавайте удобные приложения для определения местоположения. У вас должно быть доверие пользователей. Пожалуйста, предоставьте пользователю прозрачность и контроль.Для этого вам нужно будет запросить разрешение на определение местоположения. Объясните им, чем вы занимаетесь и какую пользу им это приносит. Когда что-то пойдет не так, исправьте восстановление вашего приложения. Если эти измерения в какой-то момент недоступны или что-то пойдет не так, вы можете вернуться к местоположению Fused Location Provider.
Подумайте об этом и, наконец, с уважением относитесь к обсуждаемым нами компромиссам в отношении срока службы батареи.
ФРАНК ВАН ДИГГЕЛЕН (FRANK VAN DIGGELEN) — главный инженер группы определения местоположения Android, ведущий специалист в области высокоточного определения местоположения, включая Wi-Fi и GPS.Он имеет более 90 патентов США на GPS и является автором A-GPS, учебника по Assisted-GPS. Имеет докторскую степень. из Кембриджского университета и ведет уроки GPS в Стэнфорде.
РОЙ ХОЧЕТ получил степень доктора компьютерных наук в Кембриджском университете и является научным сотрудником Google. Его интересы включают мобильные и повсеместные вычисления. Он является членом IEEE и секретарем целевой группы IEEE 802.11az (позиционирование нового поколения). На сегодняшний день он имеет более 100 патентов в этой области.
ВЭЙ ВАН (WEI WANG) — инженер-программист в группе, занимающейся местоположением и контекстом Android. Он работает над Fused Location Provider API. Его основная цель — снизить расход заряда батареи при определении местоположения, а также повысить точность определения местоположения. Он получил степень магистра в области информационной безопасности в Университете Карнеги-Меллона и степень магистра в Юго-Восточном университете в Китае.
Featured image: Фрэнк ван Диггелен, Рой Уант и Вэй Ван
,
GPS.gov: Модернизация GPS
Программа модернизации GPS — это постоянная многомиллиардная попытка обновить функции и общую производительность Глобальной системы позиционирования. Обновленные функции включают новые гражданские и военные сигналы GPS.
Узнайте больше о конкретном аспекте модернизации GPS:
Повышение производительности GPS за счет модернизации способствует политике США по сохранению лидерства в обслуживании, предоставлении и использовании глобальных навигационных спутниковых систем.Узнать больше о политике США
График
Модернизация GPS включает в себя серию последовательных спутниковых захватов, включая GPS Block IIR-M, GPS Block IIF, GPS III и GPS III Follow-On. Он также включает параллельные улучшения в сегменте управления GPS, в том числе программы GPS III в чрезвычайных ситуациях (COps), M-Code Early Use (MCEU) и Next Generation Operational Control System (OCX).
Мы больше не предоставляем информацию о текущем расписании на этой странице.Вы можете найти информацию о недавно выпущенном расписании в нашем разделе публичных презентаций.
Иди туда
Мы указываем предполагаемые даты доступности для сигналов L2C, L5 и L1C на странице New Civil Signals. Иди туда
финансирование
Модернизация GPS включает в себя полную замену устаревших спутников GPS и наземных систем на более новые, более функциональные. Эти усилия требуют значительных ресурсов от Министерства обороны, при участии Министерства транспорта.Полная информация доступна в разделе «Финансирование программы». Иди туда
Завершение выборочной доступности
Первый шаг в модернизации GPS был сделан в мае 2000 года, когда президент Билл Клинтон приказал Министерству обороны отключить функцию выборочной доступности GPS (SA).
SA была преднамеренным ухудшением точности гражданской GPS, реализованной на глобальной основе через спутники GPS. В 1990-е годы гражданские показания GPS могли быть неточными даже на футбольном поле (100 метров).В день отключения SA точность гражданского GPS повысилась в десять раз, что привело к мировой революции в гражданских и коммерческих приложениях.
В 2007 году правительство объявило, что GPS III будет построен без функции SA.
Узнать больше о выборочной доступности
,
GPS.gov: Системы увеличения
Дополнение GPS — это любая система, которая помогает GPS, обеспечивая точность, целостность, доступность или любое другое улучшение позиционирования, навигации и времени, которое не является неотъемлемой частью самого GPS.
Как в государственном, так и в частном секторе был разработан широкий спектр различных систем увеличения.
Чтобы удовлетворить особые требования, правительство США представило ряд общедоступных систем дополнения GPS, включая (но не ограничиваясь) следующие системы.
Общенациональная дифференциальная система GPS (NDGPS)
NDGPS — это наземная система дополнений, которая обеспечивает повышенную точность и целостность информации GPS для пользователей на водных путях США.
Система состоит из морской дифференциальной системы GPS, эксплуатируемой береговой охраной США (USCG).
Компонент внутреннего судоходства, финансируемый Министерством транспорта, был выведен из эксплуатации в августе 2016 года.
НОВОЕ В марте 2018 года USCG объявила о прекращении работы своих остальных 38 морских сайтов DGPS.USCG осуществит закрытие за счет поэтапного сокращения объема обслуживания, которое начнется в сентябре 2018 года и завершится к сентябрю 2020 года.
Больше информации:
Вернитесь к началу страницы
Широкоугольная система увеличения (WAAS)
WAAS, региональная космическая система функционального дополнения (SBAS), управляемая Федеральным управлением гражданской авиации (FAA), поддерживает навигацию самолетов по всей Северной Америке.
Хотя WAAS разработан в первую очередь для пользователей авиации, он широко доступен в приемниках, используемых другими сообществами, занимающимися позиционированием, навигацией и синхронизацией.
FAA стремится предоставлять услуги WAAS на уровне производительности, указанном в Стандарте характеристик GPS WAAS. FAA совершенствует WAAS, чтобы использовать преимущества будущего сигнала GPS, обеспечивающего безопасность жизни, для обеспечения еще более высоких характеристик.
Служба WAAS совместима с другими региональными службами SBAS, включая службы Японии (MSAS), Европы (EGNOS) и Индии (GAGAN).
Больше информации:
Вернитесь к началу страницы
Постоянно действующие опорные станции (CORS)
Сеть CORS США, управляемая Национальным управлением океанических и атмосферных исследований, архивирует и распространяет данные GPS для точного позиционирования, привязанные к Национальной системе пространственной привязки.
Более 200 частных, государственных и академических организаций передают в CORS данные с почти 2000 станций GPS-слежения.
Служба пользователей онлайн-позиционирования (OPUS) предлагает бесплатную постобработку наборов данных GPS до сантиметрового уровня с использованием информации CORS. CORS также модернизируется для поддержки пользователей в реальном времени.
Больше информации:
Вернитесь к началу страницы
Глобальный дифференциальный GPS (GDGPS)
GDGPS — это высокоточная система дополнения GPS, разработанная Лабораторией реактивного движения НАСА (JPL) для поддержки требований научных миссий НАСА к определению местоположения, времени и определению в реальном времени.
В будущие планы НАСА входит использование спутниковой системы слежения и ретрансляции данных (TDRSS) для распространения через спутник сообщения дифференциальной коррекции в реальном времени. Эта система называется спутниками службы расширения TDRSS (ТАСС).
Больше информации:
Вернитесь к началу страницы
Международная служба GNSS (IGS)
IGS — это сеть из более чем 350 станций GPS-мониторинга от 200 организаций из 80 стран.
Его миссия — предоставлять данные и продукцию высочайшего качества в качестве стандарта для глобальных навигационных спутниковых систем (GNSS) в поддержку исследований в области наук о Земле, междисциплинарных приложений и образования, а также для облегчения других приложений, приносящих пользу обществу.
Примерно 100 станций IGS передают свои данные отслеживания в течение одного часа после сбора.
Больше информации:
Вернитесь к началу страницы
Прочие дополнения
Во всем мире существует множество других систем дополнения GPS, как государственных, так и коммерческих.В этих системах используются дифференциальные, статические методы или методы реального времени.
Существуют также системы, дополняющие другие глобальные навигационные спутниковые системы. Соединенные Штаты сотрудничают со многими другими странами, чтобы обеспечить совместимость международных систем функционального дополнения с GPS и дополнениями GPS США.
Больше информации:
Вернитесь к началу страницы
,