Lcm controller что это: LCM controller что это
LCM controller что это
Что такое lcm controller в телефоне

Только сегодня новые ответы на вопрос что такое lcm controller в телефоне ждут вас. Много вариантов ответа на нашем сервисе ответов. Для пользователей старше 18 лет.
Качество видео: VHSRip
Видео загружено админу от пользователя Аввакум: для срочного просмотра на портале.
Чтобы дать правильный ответ на вопрос нужно посмотреть видео. После просмотра вам не потребуется обращаться за помощью к специалистам. Подробные инструкции помогут вам решить ваши проблемы. Приятного просмотра.
Юмор в теме: Акция! Купи квартиру в новостройке – и бесплатно наслаждайся строительным мусором в подъезде и грохотом перфораторов с 5 утра все ближайшие 10 лет!
Lcm controller в телефоне что это

Тема: lcm controller в телефоне что это поможем с ответом бесплатно. Тут все ответы бесплатно и еще можно обсудить вопрос с посетителями сайта. Для лиц старше 18 лет.
Качество видео: DTVRip
Видео загружено админу от пользователя Авксентий: для срочного просмотра на портале.
Чтобы дать правильный ответ на вопрос нужно посмотреть видео. После просмотра вам не потребуется обращаться за помощью к специалистам. Подробные инструкции помогут вам решить ваши проблемы. Приятного просмотра.
Юмор в теме: Рабочий приехал в санаторий по путевке. Утром с дикого бодуна обозревает пляж… Прикрываясь ладонью от яркого солнца, осматривает полуголую публику:- Отдохнешь, подлечишься… Tа здесь работать и работать!
Контроллеры — это устройства управления в электронике и вычислительной технике. Контроллер: определение, схема, устройство и виды

Контроллеры – это устройства, позволяющие производить обработку цифровых сигналов. Буквально несколько десятилетий назад все логические системы строились на основе электромеханических реле. Они до сих применяются, но в большинстве сфер были вытеснены микроконтроллерами. Наибольшее распространение контроллеры получили в промышленности, именно в системах управления и автоматизации. Впервые на рынке электроники появилось устройство MODICON производства Bedford Associates в 1960-х годах.
Аналогичные устройства, разработанные другими компаниями, стали известны как ПЛК. А если точнее, то это программируемые логические контроллеры. Их работа зависит от программы, которую записывают при помощи персонального компьютера через специальный интерфейс. Именно благодаря использованию устройств на контроллерах получилось заменить большое количество электромеханических реле логическими элементами.
Особенности ПЛК
Для того чтобы понять, что такое контроллер, необходимо разобраться с его устройством и назначением. У программируемого элемента несколько входов – с их помощью происходит контролирование состояния выключателей и датчиков. И есть выходные клеммы, которые подают сигналы различного уровня на электроклапаны, контакторы, электроприводы, реле и другие исполнительные устройства.

Программирование ПЛК очень простое, потому что язык, на котором это делается, очень схож с логикой работы электромагнитных реле. Если инженер-электрик или обычный монтер умеет читать схемы релейных систем, то он без особых трудностей сможет выполнить программирование контроллеров. Это займет немного времени, все зависит от количества логических элементов и функций.
Нужно отметить, что, в зависимости от модели ПЛК, подключение к ним источников сигналов и особенности программирования будут незначительно отличаться. Но суть процедуры настройки остается неизменной.
Подключение элементов к ПЛК
Во всех моделях контроллеров есть клеммы для подключения питания – некоторые нуждаются в переменном напряжении вплоть до 120 В, а другие — в постоянном до 24 В. Напряжение питания зависит от модели устройства. Входные клеммы обозначаются буквой Х – на каждую подается отдельный сигнал. Общий провод обычно соединяется с нейтралью источника переменного тока или с минусом постоянного.
В корпусе контроллера есть оптический изолятор – простой светодиод. С его помощью происходит связь входной клеммы и общей. При подаче напряжения на ПЛК загорается светодиод – именно по нему можно судить о том, что устройство работает. На выходе происходит генерация сигнала при помощи компьютерной схемотехники – активируется устройство переключения. В качестве переключающего устройства могут использоваться электромагнитные реле, транзисторы, силовые ключи, тиристоры. Выходы обозначаются буквой Y. На каждом выходе устанавливается светодиод, сигнализирующий о том, что устройство работает.
Как происходит программирование
Контроллеры – это устройства, позволяющие обрабатывать электрический сигнал и преобразовывать его. На сегодняшний день в ПЛК ставится логика при помощи компьютерной программы. Именно она определяет, на каких выходных клеммах будет присутствовать напряжение при определенных условиях на входных клеммах. Отчасти эта логика схожа с той, которая применяется в релейной схемотехнике. Но в ней нет никаких реле, переключателей, контактов. Написание и просмотр программы происходит при помощи компьютера, который соединяется с портом программирования.
Логика простой программы

Допустим, у нас есть контроллер, лампа и выключатель. Контроллер подключается к источнику питания, со входом соединяется выключатель, а на выходе ставится лампа. При нажатии кнопки должна загораться лампа. Вариант простейшей программы для ПЛК:
- При разомкнутом выключателе на вход не подается напряжение, поэтому на выходе лампа не будет загораться.
- При нажатии на кнопку подается сигнал на вход. В программе контакты, соответствующие порту, будут активироваться. Все мнимые реле начнут работать внутри контроллера. Это образное обозначение, на деле никаких электромагнитных реле в нем нет. В результате появляется напряжение на выходе контроллера и лампа загорается.
Все действия, которые производятся с контроллерами, удобнее всего рассматривать на примере электромагнитных реле. Так нагляднее видна работа устройства.
Зачем нужен компьютер
При помощи компьютера происходит создание логической связи между входными и выходными клеммами. Программное обеспечение, с помощью которого осуществляется составление логики, позволяет направить в контроллер виртуальный сигнал и проследить, как он будет действовать при определенных условиях. После того как будет заложена логика внутрь ПЛК, компьютер отключается и контроллер работает самостоятельно. Все команды, которые ему были заданы на этапе программирования, он сможет выполнять без сторонней помощи.
Универсальность ПЛК
Чтобы понять всю силу и универсальность программируемых компонентов, необходимо рассмотреть несколько типов программ. Контроллер – это программируемый элемент, поэтому без вторичной настройки подключенных к нему элементов можно изменить все заданные команды. Допустим, вам нужно изменить программу, рассмотренную выше – при замыкании кнопки должна тухнуть лампа, а при размыкании загораться.

Для выполнения такой команды нужно просто поменять местами типы команд, которые были ранее. При нажатии на кнопку должно подаваться напряжение на вход ПЛК, а мнимое реле, которое находится в нем, имеет нормально-замкнутые контакты. Поэтому при подаче напряжения контакты размыкаются и лампа тухнет. Но когда в схеме контроллера пропадает сигнал, мнимое реле замыкает контакты и лампа загорается.
Преимущества контроллеров
Одно из преимуществ контроллеров – это возможность реализации в программном обеспечении логического контроля. Причем, в отличие от релейного оборудования, выходной сигнал может использоваться столько раз, сколько требуется для автоматизации. При помощи контроллера для систем автоматизации можно спроектировать систему запуска и останова электродвигателя. Чтобы построить аналогичную систему на электромеханических элементах, нужно использовать три реле.

При использовании контроллера на две входные клеммы подключаются кнопки. На выходе устанавливается электрический двигатель. Логика выглядит таким образом:
- При нажатии кнопки, соединенной с выводом Х1, происходит запуск мотора. При этом контакты мнимого реле запускаются и на выходе появляется напряжение питания.
- При нажатии кнопки, соединенной с Х2, мотор останавливается. При этом происходит игнорирование того факта, что ранее была нажата первая кнопка.
Причем все процессы, которые происходят в контроллерной системе, могут дублироваться для удаленного мониторинга. Именно с помощью такого свойства реализуется удаленное управление системами. Теперь вы знаете, что такое контроллеры и каковы их ключевые особенности. Программирование устройств может осилить любой человек, который разбирается в компьютерной и релейной технике.
Декодер инициализации LCM драйвера MTK
Подробная инстукция о работе с LCM тут . Изучаем, думаем — это не простая работа и не всегда заканчивается результатом.
Инструкция:
С помощью редакторов двоичного кода найдите предпологаемую последовательность инициализации вашего типа экрана, после этого сохраните код в отдельном файле и загрузите на эту страницу. Правильный код инициализации проще найти в файле lk.bin вашего телефона.
Подбирая параметры вы можете получить правильный код для вставки в драйвер LCM вашего устройства.
Обычно это такая последовательность:
Структура выглятит так
Это пример с блоком данных 120 байт (типичное значение 64 байта)
Автор искренне выражает благодарность всем кто словом и материально поддерживает мои проекты.
К сожалению реально помогающих очень мало и каждый хочет схалявничать и получить все задаром.
(c) Все авторские материалы должны быть скопированы на другие ресурсы с указанием ссылки на этот сайт.
Не разрешается размещать прямые ссылки на файлы на других сайтах — указывайте ссылки на страницы этого сайта.
Прошу вас содействовать в наведении порядка!
Основной спонсор проекта моя микрокомпания — «Виртуальный Проект». Если нужен сайт — я сделаю!
Как настроить?
Всё о Интернете, сетях, компьютерах, Windows, iOS и Android
Что такое ШИМ-контроллер PWM и для чего он нужен

Любой радиолюбитель, начинающий телемастер или электрик рано или поздно столкнётся с такой штукой, как ШИМ-контроллер. За рубежом он маркируется как PWM. Поэтому сегодня я хочу остановиться на вопросе что такое ШИМ-контроллер, как он работает и для чего нужен. Даже если Вы не планируете заниматься ремонтом электронной техники, всё равно эта статья будет интересна для общего ознакомления.
Широтно-импульсный модулятор — принцип работы
Аббревиатура ШИМ расшифровывается, как широтно-импульсный модулятор. На английском это будет так — pulse-width modulation или PWM. В теле- и радио-технике ШИМ-контроллеры используются для преобразования напряжения, их можно встетить даже в качестве узлов системы управления скоростью электроприводов в бытовых приборах, меняя скорость электродвигателя. PWM-контроллер есть даже в обычных импульсных блоках питания.

Там постоянное напряжение на входе преобразуется в импульсы прямоугольной формы, которые формируются с определенной частотой и с определённой скважностью. На выходе, с помощью управляющих сигналов, получается регулировать работу целого транзисторного модуля большой мощности. Таким образом разработчики получили блок управления напряжением регулируемого типа, который значительно меньше и удобнее старых, которые используют понижающий трансформатор, диодный мост и фильтр помех.
Главные плюсы ШИМ:
В Интернете Вы можете встретить ШИМ-контроллер на Arduino или NE555. Это не совсем контроллер, а скорее уже генератор ШИМ-импульсов, в которых нет возможности подключения цепи обратной связи. Такие устройства подходят больше для регуляторов напряжения, чем для обеспечения стабильного питания приборов, ведь они могут использоваться только для регулирования выходных параметров, но не для их стабилизации.
Стандартная схема ШИМ-контроллера, который используется в теле-, радио- и иной электронной аппаратуре, характеризуется наличием нескольких выходов.
Общий вывод (GND) — контакт подключается к общему проводу схемы питания контролера. Он соединен с аналогичным контактом схемы подачи питания модуля и контроллирует напряжение на выходе схемы, отключая ее при снижении значения ниже пороговой величины.
Вывод питания (VC) — этот вывод ШИМ-контроллера отвечает за энергоснабжение схемы и подключение питания. Как правило, вывод контроля питания и вывод питания располагаются рядом друг с другом. Не перепутайте его с выводом VCC.
Вывод контроля питания (VCC) — следит, чтобы напряжение питания микросхемы было выше определенного значения. Обычно этот контакт соединяют с VC. Если напряжение на этом выводе падает ниже заданного порогового значения для данного PWM-контроллера, то контроллер выключается. Если этого не делать, то при снижении напряжение на выходе схемы, то транзисторы начнут открываться не полностью и будут быстро нагреваться, что приведёт к поломке.
Выход контроллера OUT – это выходное управляющее напряжение, другими словами отсюда подаётся управляющий ШИМ-сигнал для силовых ключей. Тут надо отметить, что микросхемы бывают разные. Например, есть с друмя выходами — двухтактные, которые применяются для управления двухплечевыми каскадами. Да и сам выходной каскад может быть одно- и двухтактным. Тут главное не запутаться!
Вывод VREF — Опорное напряжение. Обеспечивает работу функции формирования стабильно опорного напряжения. Как правило, екомендуется соединять его с общим проводом конденсатором 1 мкФ для повышения качества и стабильности опорного напряжения.
Вывод ILIM — Ограничитель выходного тока. Это сигнал с датчика тока. Если напряжение на этом выводе превышает заданный порог (как правило, это 1 Вольт), то ШИМ-контроллер закрывает силовые ключи. Если же превышается ещё больший порог (обычно 1.5 Вольта), то PWM-контроллер сбрасывает напряжение на ножке мягкого старта и импульсы на выходе прекращаются.
Вывод ILIMREF — задаёт значение ограничения выходного тока на выводе ILIM.
Вывод SS — так называемый «мягкий старт». Напряжение на этом контакте ограничивает максимально возможную ширину импульсов. Сюда ШИМ-контроллер подает ток фиксированной силы.
Вывод RtCt – используется для подключения времязадающей RC-цепи, используемой для определения частоты ШИМ-сигнала.
Вывод RAMP – это ввод сравнения. Рабоает это так. На контакт подаётся пилообразное напряжение. Как только оно превышает значение напряжение на выходе усиления ошибки, вывод OUT появляется отключающий сигнал. Это основа ШИМ-регулирования.
Вывод CLOCK – тактовые импульсы. Используются для синхронизации между собой сразу нескольких ШИМ-контроллеров. В этом случае RC-цепь подключается только к ведущему контроллеру, RT ведомых соединяется с Vref, а CT ведомых соединяюся с общим.
Вывод INV — это инвертирующий вход компаратора. На нём построен усилитель ошибки. Чем больше напряжение на INV, тем длиннее выходные импульсы.
Вывод NONINV – это неинвертирующий вход компаратора. Его обычно подключают к общему проводу — GND.
Вывод EAOUT — выход усилителя ошибки — Error Amplifier Output. С этого вывода осуществляется частотная коррекция усилителя ошибки, путём подачи сигналов на INV через частотозависимые цепи. Дело в том, что PWM-контроллер достаточно медленно реагирует на воздействие через вход усилителя ошибки и потому схема может сгореть из-за возбуждения. Поэтому и применяется вывод EAOUT.
Как проверить ШИМ-контроллер
Есть несколько способов как сделать проверку ШИМ-контроллера. Можно, конечно это сделать без мультиметра, но зачем так мучаться, если можно воспользоваться нормальным прибором.
Прежде, чем проверять работу ШИМ-контроллера, необходимо выполнить базовую диагностику самого блока питания. Она выполняется так:
Шаг 1. Внимательно осмотреть в выключенном состоянии сам источник питания, в котором установлен PWM. В частности надо тщательно осмотреть электролитические конденсаторы на предмет вздутости.
Шаг 2. Провести проверку предохранителя и элементов входного фильтра блока питания на исправность.
Шаг 3. Провести проверку на короткое замыкание или обрыв диодов выпрямительного моста. Прозвонить их можно не выпаивая из платы. При этом надо быть уверенным, что проверяемая цепь не шунтируется обмотками трансформатора или резистором. Если есть на это подозрение, то всё таки придётся выпаивать элементы и проверять уже по отдельности.
Шаг 4. Провести проверку исправностм выходных цепей, а именно электролитических конденсаторов низкочастотных фильтров, выпрямительных диодов, диодных сборок и т.п.
Шаг 5. Провести проверку силовых транзисторов высокочастотного преобразователя и транзисторов каскада управления. При этом в обязательном порядке проверьте возвратные диоды, которые включенны параллельно электродам коллектор-эмиттер силовых транзисторов.
Проверка ШИМ-контроллера — видео инструкции:
Встроенная функция для расчета LCM в C ++
Много раз, пока мы занимаемся программированием, нам нужно вычислить наименьшее общее кратное (LCM) между двумя числами. Мы уже обсуждали, как найти LCM в этом посте .
Вместо определения и последующего использования функции для вычисления lcm, мы можем просто использовать встроенную функцию библиотеки boost C ++, boost :: math :: lcm () .
Для использования этой функции мы должны объявить файл заголовка <boost / math / common_factor.hpp> .
Синтаксис:
boost::math::lcm (m,n) Parameters: m, n Return Value: 0 if either m or n are zero, else lcm of mod(m) and mod(n).
|
Выход:
LCM(10,20) = 20
Важные моменты:
- Функция вычислит lcm после определения модуля обоих чисел, поэтому, если любое из чисел будет отрицательным, оно будет преобразовано в его модуль, а затем вычислен LCM.
- В случае, если какое-либо число является нецелочисленным типом данных, эта функция выдаст ошибку.
#include <iostream>#include <boost/math/common_factor.hpp>usingnamespacestd;intmain(){cout <<"LCM(1.0,20) = "<< boost::math::lcm(1.0,20)<< endl;return0;}Этот код выдаст ошибку, так как один из аргументов функции имеет тип double, поэтому этот код не будет работать.
- В C ++ 17 была введена новая функция STL для вычисления LCM из двух чисел, std :: lcm () , которая может использоваться на любом компиляторе, поддерживающем функции C ++ 17.
Эта статья предоставлена Мригендрой Сингх . Если вы как GeeksforGeeks и хотели бы внести свой вклад, вы также можете написать статью с помощью contribute.geeksforgeeks.org или по почте статьи [email protected]. Смотрите свою статью, появляющуюся на главной странице GeeksforGeeks, и помогите другим вундеркиндам.
Пожалуйста, пишите комментарии, если вы обнаружите что-то неправильное, или вы хотите поделиться дополнительной информацией по обсуждаемой выше теме.
Рекомендуемые посты:
Встроенная функция для расчета LCM в C ++
0.00 (0%) 0 votes
Допиливаем контроллер для электро велосипеда, добавляем из воздуха 3 новых функции, и ускоряемся. | | Пелинг
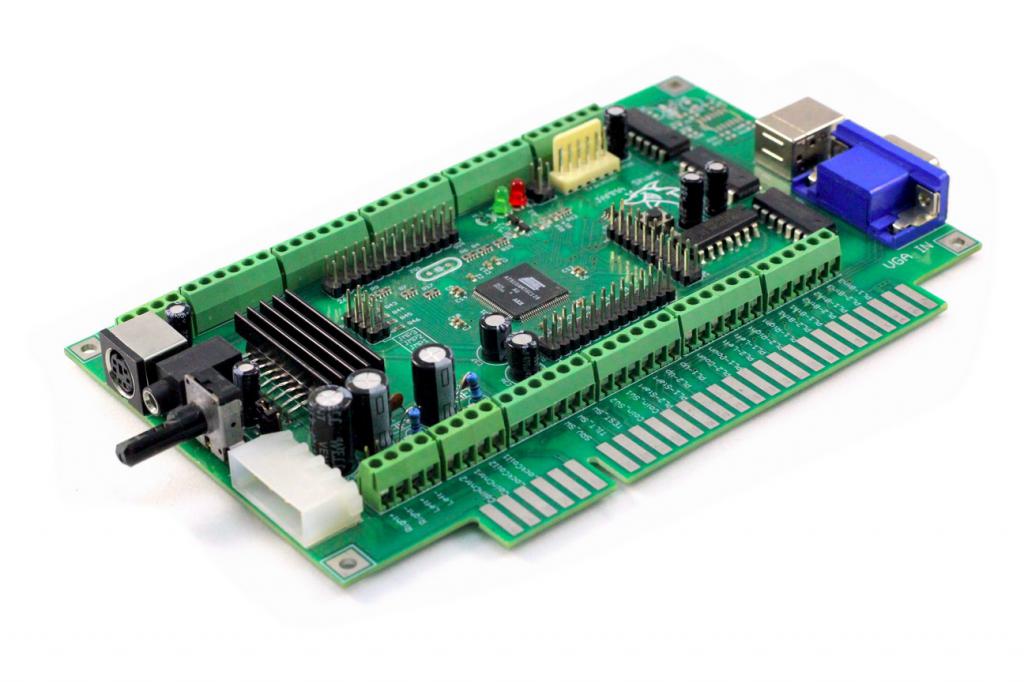
Допиливаем контроллер для электро велосипеда, добавляем из воздуха 3 новых функции, и ускоряемся. И так Почитав сайты полазив на форумах коротко понял одну главную вещь. Не вдаваясь в подробности, но у всех контроллеров могут быть скрытые функции которых изначально нет. Повозившись и убив около 28 часов со своим контроллером в режиме нон стоп, нашел все то что мне нужно было, и даже больше того. Еще короче, информации по данному контроллеру нет нигде!
Если кто-то столкнулся с такой же проблемой и у него есть такой же контроллер данная информация представленная в теме и в самом ролике сведет на нет ваше мучение и добавив только положительных эмоций поможет вам без труда про абгрейдить его, как это сделал я.
И так мой контроллер :
Brushless DC Motor Controllers
Модель : SYK-36-80W
Рассчитан на напряжение: 36В, может спокойно работать с минимальными изменениями измерителя напряжения АКБ на 48 Вольтах, в пике до 62В с заменой электролитов пик составляет 72 В. Лично меня внештатный разгон по питанию сильно не интересует, так как у этого метода больше минусов чем плюсов!
Выходная мощность номинал/пиково : 800 Ватт/1600 Ватт
Напряжение: 1.1 -4.2В.
Данный контроллер изначально имеет 3 скорости
1 скорость 25 км/ч
2 скорость 35 км/ч
3 скорость 45 км/ч
На скорость влияет диаметр колес, и нагрузка на мотор, в виде того же веса рамы и пилота.
Скорость выбирается относительно земли(минус) К1 — первая скорость, К2 — третья скорость, и если К1 или К2 не подключены на землю, автоматом выбирается вторая скорость. Можно вывести на руль и при правильной не сложной разводке переключать скорости во время движения, Выбор правильной мах скорости способствует меньшей пиковоемой мощности.
Памятка : При любом разгоне или увеличении скорости возрастает ток потребления мотора что приводит к уменьшению дистанции пробега, отсюда выражение тише едешь дальше будешь, как нельзя кстати подходит для этих режимов. Как мне кажется самый идеальный вариант вывести скорости на руль и переключатся уже по ходу движения. Разрешается пользоваться данным режимом не отключая контроллер!
Скрытые режижимы :
Режим рекуперации: Здесь идет обозначение буквой Х — на самом деле это не буква икс, а символ пере подключения колеса в роль генератора и обратно. Многие ошибочно полагают что это буква.
Данный режим должен подключатся кнопкой при нажатии ручки тормоза. Активация режима производится от точки Х через кнопку тормоза относительно минуса(земли). При этом если тормоз подключен к точкам SL или SH, провод нужно перенести с этих точек, и подключится к точке Х, смотри в видео.
Памятка: В активном режиме перевода колеса из мотора в генератор возврат энергии полностью зависит от оборотов мотор колеса. и может составлять от 80 до 100% в идеальных условиях. Если аккумуляторы сели то скатившись с горки при слегка нажатом тормозе чтобы не задействовав механическую систему торможения, а активировался режим рекуперации по кнопке в ручке тормоза. то при идеальных условиях и хорошем уклоне и разогнавшись до 20-25км/ч примерно на 100 метров мы можем сгенирировать энергии, чтобы проехать около 10 метров. Данные примерные! Расстояние может быть и немного большим.
Режимы SL, SH— это торможение с частичными рекуперативными свойствами мотора. Рекуперация в этих режимах от 5 до 20% относительно мах 100 %. Разницы при движении между этими режимами взрослому человеку почти не будут заметны. Отсюда на мой взгляд это без полезные режимы. А сильная нагрузка на колодки и нужное усилие чтобы остановить такую мощность только скажутся на их сильном износе, за короткое время.
Режим Q — круиз контроль, очень полезная функция включается через 5-10 сек после того как скорость становится стабильной. Руки в таком режиме особенно после пробок вам только скажут спасибо. В данном режиме контроллер сам подбирает оптимальные значения мотора что может положительно сказаться на движении даже в маленькие горки, при этом скорость может не меняется, так как контроллер сам думает за вас. Отключается режим либо тормозом, достаточно короткого нажатия чтобы сработала кнопка. Либо же выключается ручкой акселератора.
Режим Пассивной безопасности А3 — подключение относительно земли(минуса) может включатся скрытым тумблером, активируя дополнительный режим блокировки мотора, который не только не даст укатить велосипед но и будет сопротивлятся. К сожалению рук мало показать полностью в видео данный режим не получилось. Можно попробовать подключить данный режим к сигнализации и управлять им с пульта дистанционно.
Зачастую в сигнализациях для электротранспорта в последних моделях он уже используется по умолчанию. И ни каких дополнительных действий не требуется. Но знать что эта точка в контроллерах есть, на мой взгляд пригодится.
Большая часть данной информации была добыта мной как всегда опытным путем.
Ну и картинка с основными точками ниже :
Ну и наверно хватит мне вас грузить остальное вы увидите в видео, надеюсь данный опыт кому-то поможет!
К сожалению сильно растягивать видео не стал, но скажу что я провел полную промывку платы, и покрытие с заливкой ее желтым лаком в три слоя каждой стороны, чтобы убрать проблему конденсата так как контроллер установлен под колесом!
Другие статьи
Поделиться ссылкой:
Понравилось это:
Нравится Загрузка…
Похожее
что такое и где взять драйвер
Черные ящики компов хранят в себе много всякой всячины – неизвестной и непонятной. Не успели мы узнать о существовании контроллера шины SMBus и разобраться, где добывать для него драйвер, как перед нами замаячил еще один загадочный контроллер-непонятно-чего. И он, представьте себе, тоже требует соблюдения прав на установку личного драйвера.

Продолжим приручение электронных загогулин, которыми нашпигованы наши железные друзья. На очереди – PCI контроллер Simple Communications. Разберемся, что это такое, для чего нужно и где взять для него драйвер.
Что такое PCI контроллер Simple Communications
PCI Simple Communications Controller – Windows-компонент подсистемы Intel Management Engine (Intel ME), представленной микропроцессором, интегрированным в чипсеты одноименной марки, и его программным кодом.
В доступной документации, которая описывает функциональность и назначение Management Engine, говорится, что эта подсистема управляет отдельными технологиями Intel, связанными с контролем температурных режимов устройства, электропитанием в состоянии низкого энергопотребления, а также с защитой девайса от кражи и лицензированием некоторых программных продуктов. Однако там же сказано, что этот перечень функций не является исчерпывающим.
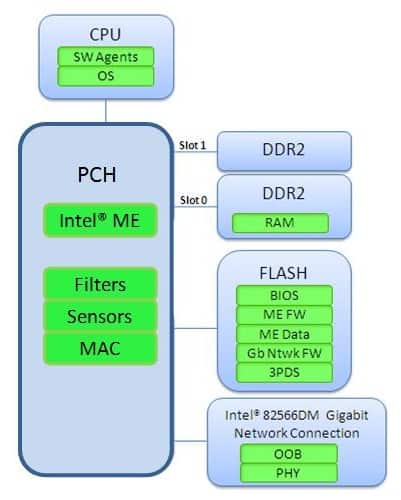
Что еще представляет собой Intel ME и на что она способна, можно только вообразить. Например, тот факт, что она расположена в самом «сердце» материнской платы – главной микросхеме, которая связана со всеми компонентами компьютера; работает без сна и передышки, так как питается от батарейки часов реального времени; имеет доступ к содержимому оперативной памяти; получает данные с датчиков аппаратного мониторинга; оснащена собственным сетевым интерфейсом с MAC-адресом и прямой связью с контроллером Ethernet, говорит о широчайших возможностях в плане установления удаленного доступа к устройству (даже выключенному!) и шпионажа за пользователем.
Впрочем, подтвердить или опровергнуть эти догадки пока не получается, так как принцип работы основной части Management Engine не документирован, а программный код зашифрован.
То, что она представляет собой легитимный бэкдор для спецслужб, Intel, разумеется, отрицает. Попытки взломать и отключить ME предпринимались раньше и предпринимаются сейчас, однако запретить ее запуск полностью нельзя, так как без нее невозможна загрузка центрального процессора.
Хотим мы или нет, но налаживать взаимодействие придется. И в этом нам поможет драйвер PCI контроллер Simple Communications.
Что означает ошибка PCI Simple Communications Controller. Откуда скачать драйвер
Ошибки PCI Simple Communications Controller встречаются только на компьютерах, оснащенных чипсетом Intel, поскольку системы на AMD эту технологию не поддерживают (не надейтесь, что они не шпионят, просто используют собственный аналог Intel ME).
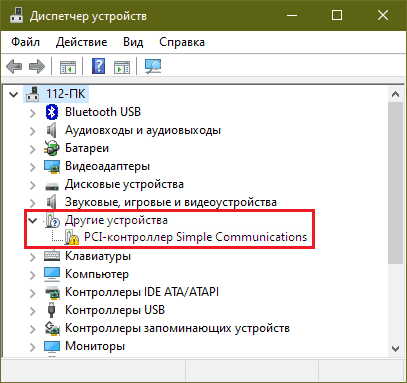
Выглядит ошибка примерно так, как показано на скриншоте выше – в Диспетчере устройств возле контроллера стоит желтый треугольник с восклицательным знаком. И, как вы наверняка догадались, для ее устранения достаточно переустановить драйвер, который можно скачать…
- … с сайта производителя вашего ноутбука или материнской платы ПК. Для некоторых моделей устройств отдельного драйвера Intel ME может не быть. Иногда разработчики включают его в состав пакета драйверов для чипсета.
- … с сайта Intel.
Для поиска подходящей версии драйвера Management Engine в центре загрузки Intel необходимо знать поколение либо модель чипсета/процессора вашего ПК, а также версию операционной системы.
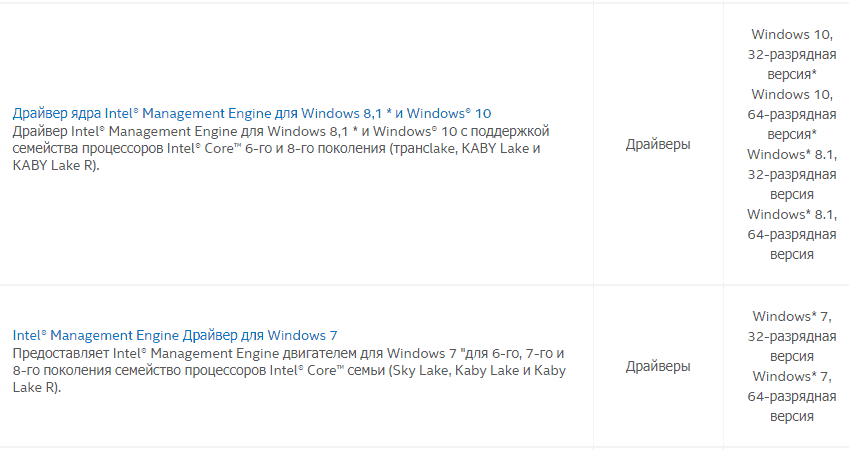
На фрагменте этой таблицы представлены драйверы, предназначенные для шестого, седьмого и восьмого поколения процессоров семейства Intel Core – отдельный дистрибутив для установки на Windows 8.1 и 10 и отдельный для Windows 7. Эти драйверы совместимы с любыми моделями материнских плат на чипсете Intel, если на них установлен один из упомянутых ЦП.
Узнать, какой модели процессор и чипсет (PCH) работают в вашем компьютере, помогут уже известные вам утилиты аппаратного мониторинга, такие как AIDA64 или
The Realtek Network Controller was not found — как исправить
Компьютер состоит из многих составляющих частей, и неудивительно, что время от времени какая-либо из них дает сбой или вызывает ошибку работы всего устройства в целом. Сегодня мы установим, почему возникает ошибка The Realtek Network Controller was not found, как исправить ее и каким образом избежать появления этой проблемы в будущем.
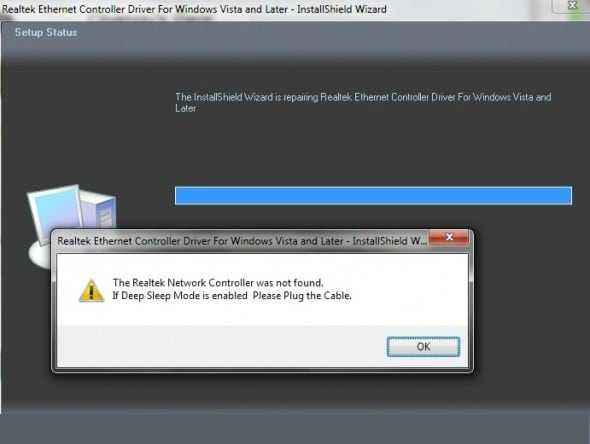 Ошибка If Deep Sleep mode is enabled Please Plug the Cable
Ошибка If Deep Sleep mode is enabled Please Plug the Cable
Где кроется причина проблемы
Ошибка The Realtek Network Controller was not found выдается при некорректной работе сетевой карты. Процессор не “видит” последнюю и не способен к ней “обратиться”. Как видно на первой картинке, название ошибки дополнено ее описанием If Deep Sleep Mode enabled Please Plug the Cable. Это означает невозможность запуска сетевой карты из-за того, что она не выходит из спящего режима вместе с другими составляющими компьютера. Что при этом происходит?
- Отключается соединение с сетью.
- Мы не видим в диспетчере устройств установленное на компьютере оборудование, обеспечивающее подключение к интернету.
Конечно, сетевой адаптер мог совсем выйти из строя, и теперь необходимо покупать новый. Но перед этим крайним шагом нужно попытаться исправить ошибку всеми известными способами.
Способы исправления ошибки сетевой карты
Ошибку The Realtek Network Controller was not found можно исправить обновлением или переустановкой драйверов, отключением питания сетевой карты, изменением свойств контроллера и другими способами. Ознакомимся с ними и попробуем их в деле.
Обновляем или переустанавливаем драйверы
Попробуем обновить либо переустановить драйверы.
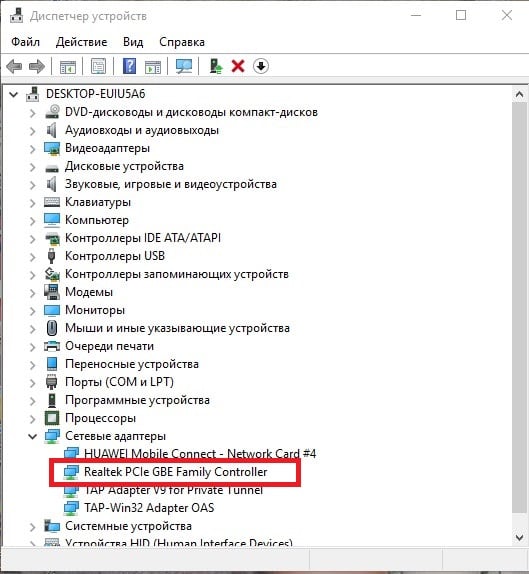
- Заходим в “Диспетчер устройств” (в Windows 10 выбираем его после клика ПКМ по кнопке “Пуск”).
- Раскрываем строчку “Сетевые адаптеры” и нажимаем ПКМ на Realtek PCIe GBE Family Controller.
 Обновление или переустановка драйверов
Обновление или переустановка драйверов - Обновляем драйверы, выбирая автоматический поиск.
- Если драйверы для сетевого адаптера актуальны, то система выдаст сообщение о том, что они не нуждаются в обновлении. Тогда мы снова нажимаем ПКМ на название сетевой карты и удаляем инсталлированные драйверы.
- Затем скачиваем нужный софт с официального сайта и устанавливаем на свой ПК.
Если это не помогает исправить ошибку, пробуем другой вариант.
Изымаем сетевую карту и отключаем питание
Второй способ предполагает изъятие сетевого адаптера из корпуса и возврат его на место, после чего контроллер должен выйти из режима “глубокого сна”. Сделать это нужно правильно, соблюдая определенный порядок действий.
- Полностью отключаем компьютер от сети.
- Очень (!) аккуратно извлекаем планки оперативной памяти из слотов материнской платы, где они установлены.
- Оставляем все устройства в покое примерно на полчаса. Чем дольше, тем лучше, так как подобный прием должен прервать режим глубокого сна сетевого контроллера.
- Устанавливаем на место планки оперативной памяти.
- Запускаем Windows и проверяем, подключился ли компьютер к сети.
Если и это не помогает разрешить проблему The Realtek Network Controller was not found, то извлекаем батарею из ноутбука или отключаем стационарный ПК от сети на срок до 12 часов и по истечении этого времени вновь запускаем устройство.
Пробуем “разбудить” сетевую карту при помощи внешнего накопителя
Завершаем работу компьютера, подсоединяем к нему внешний жесткий или USB-накопитель и запускаем систему. Вместе с попыткой компьютера установить новое устройство должен “проснуться” и сетевой контроллер. Не помогло – идем дальше.
Изменяем свойства сетевого контроллера
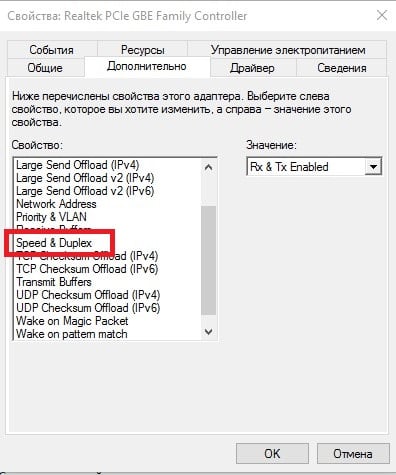
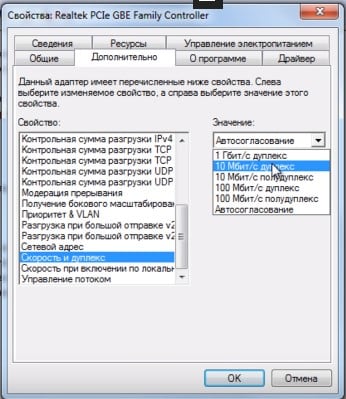
- Раскрываем в диспетчере задач сетевые адаптеры и делаем двойной щелчок ЛКМ по Realtek PCIe GBE Family Controller.
- Появляется окно “Свойства”, и мы переходим во вкладку “Дополнительно”.
- Здесь выбираем “Скорость и Дуплекс”.
 Изменение свойств контроллера
Изменение свойств контроллера
В блоке “Значение” нажимаем на “Автосогласование” (Auto Negotiation), выбираем из выпадающего списка скорость 10 Мбит/с с дуплексом (10 Mbps Full Duplex) и подтверждаем действие.
 Выбираем значение скорости
Выбираем значение скорости
После этого перезагружаем компьютер и проверяем, удалось ли нам “разбудить” сетевой адаптер.
Проверяем питание контроллера в BIOS
Проверим в BIOS, включено ли питание сетевого адаптера.
- Запускаем систему, входим в BIOS и ищем настройки Onboard Lan (или другую, в названии которой есть Lan) или Integrated NIC.
- В этом пункте должно быть указано значение Enabled “Включено”.
- Если указано обратное, включаем питание, перезагружаем компьютер и снова проверяем работу сетевой карты.
Как предотвратить проблему
- Мало исправить ошибку, проявляющуюся в данный момент. Нужно еще сделать так, чтобы проблема не возникала в будущем.
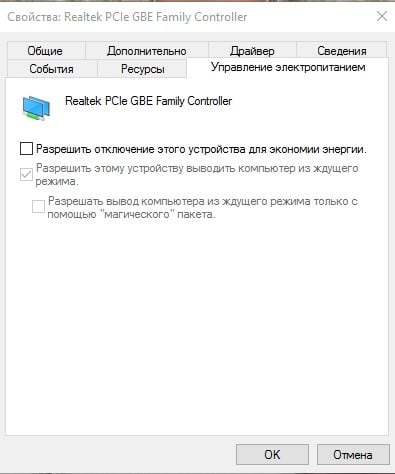
- Открываем свойства сетевого адаптера в диспетчере устройств и переходим во вкладку “Управление электропитанием”.
- Убираем галочку в квадратике напротив строки “Разрешить отключение этого устройства для экономии энергии”.Предотвращаем появление ошибки в будущем
- Подтверждаем действие и перезагружаем ПК.
Один из этих способов наверняка поможет избавиться от ошибки The Realtek Network Controller was not found, если, конечно, сетевая карта полностью работоспособна.
| LCM | Наименьшее общее кратное Академические и естественные науки »Математика — и многое другое … | Оцените: | |||||||||
| LCM | Жизненный цикл Управление Академия и наука »Метеорология — и многое другое … | Оцените: | |||||||||
| LCM | Меньше рыночных затрат Бизнес» Бухгалтерский учет | Оцените: | |||||||||
| LCM | Служба лютеранских кампусов Академические и научные »Университеты и многое другое… | Оцените: | |||||||||
| LCM | Счетчики длинного курса Sports | 3 | LCM | Levitt Capital Management Бизнес »Компании и фирмы | Оцените его: | ||||||
| LCM | Десантные корабли Разное Десантные корабли, Разное — и больше… | Оцените: | |||||||||
| LCM | Маленькая компания Мары Бизнес »Компании и фирмы | Оценить | |||||||||
| LCM | Модель жизненного цикла Государственный »Военный | Оцените его: | |||||||||
| LCM | Левая стоимость 9000i | Оцените: | |||||||||
| LCM | Управление логистической цепочкой Государственный »Военный | ||||||||||
Lure Courser of Merit Разное us »Связанные с собаками | Оцените это: | ||||||||||
| LCM | Язык для концептуального моделирования Вычислительная техника» Общие вычисления | ||||||||||
| LCM | Режим локальных команд Вычисления »Сборка | Оценить: | |||||||||
| LCM | Вычислительный модуль общего назначения | Оцените: | |||||||||
| LCM | Движение Литовского центра Государственная политика | Лансинг ‘s Christian Messenger Сообщество »Новости и СМИ — и многое другое… | Оцените: | ||||||||
| LCM | Молекулярный сердечник с лазерным захватом Медицина »Медицинская физика | 900 | |||||||||
| LCM | Закуски с большим количеством калорий Разное »Приколы | Оценить: | |||||||||
| Физика | Оцените: | ||||||||||
| LCM | Наименьшее общее кратное Разное »Несекретный | 9000 | LCM | Laser Captur e Молекулярный Разное »Несекретный | Оцените: | ||||||
| LCM | Лондонский музыкальный колледж Академический и естественный | Оцените это: | |||||||||
| LCM | Руководство по зарегистрированным компаниям Бизнес »Компании и фирмы | Оцените потерю: | |||||||||
| LCM Материал Академия и наука »Химия | Оцените: |
,
Что такое микроконтроллер? — Как работают микроконтроллеры
Микроконтроллер — это компьютер. Все компьютеры — будь то персональный настольный компьютер, большой мэйнфрейм или микроконтроллер — имеют несколько общих черт:
- Все компьютеры имеют ЦП (центральный процессор), который выполняет программы. Если вы сидите за настольным компьютером прямо сейчас и читаете эту статью, центральный процессор этого компьютера выполняет программу, реализующую веб-браузер, отображающий эту страницу.
- ЦП загружает программу откуда-то. На вашем настольном компьютере программа браузера загружается с жесткого диска.
- В компьютере есть ОЗУ (оперативная память), где он может хранить «переменные».
- У компьютера есть устройства ввода и вывода, поэтому он может разговаривать с людьми. На настольном компьютере клавиатура и мышь являются устройствами ввода, а монитор и принтер — устройствами вывода. Жесткий диск — это устройство ввода-вывода — он обрабатывает как ввод, так и вывод.
Настольный компьютер, который вы используете, является «компьютером общего назначения», на котором можно запускать любую из тысяч программ.Микроконтроллеры — это «компьютеры специального назначения». Микроконтроллеры хорошо справляются с одной задачей. Есть ряд других общих характеристик, которые определяют микроконтроллеры. Если компьютер соответствует большинству этих характеристик, вы можете назвать его «микроконтроллер»:
- Микроконтроллеры — это «, встроенные » в какое-то другое устройство (часто потребительский продукт), чтобы они могли управлять функциями или действиями продукта. Поэтому другое название микроконтроллера — «встроенный контроллер».«
- Микроконтроллеры выделены для одной задачи и запускают одну конкретную программу. Программа хранится в ПЗУ (постоянное запоминающее устройство) и обычно не изменяется.
- Микроконтроллеры часто представляют собой маломощных устройств . Настольный компьютер почти всегда подключается к розетке и может потреблять 50 Вт электроэнергии. Микроконтроллер с батарейным питанием может потреблять 50 милливатт.
- Микроконтроллер имеет специальное устройство ввода и часто (но не всегда) имеет небольшой светодиод или ЖК-дисплей для вывода .Микроконтроллер также принимает входные данные от устройства, которым он управляет, и управляет устройством, отправляя сигналы различным компонентам устройства. Например, микроконтроллер внутри телевизора принимает входные данные с пульта дистанционного управления и отображает выходные данные на экране телевизора. Контроллер управляет переключателем каналов, акустической системой и некоторыми регулировками электроники кинескопа, такими как оттенок и яркость. Контроллер двигателя в автомобиле принимает данные от датчиков, таких как кислородный датчик и датчик детонации, и управляет такими вещами, как смесь топлива и синхронизация свечей зажигания.Контроллер микроволновой печи принимает ввод с клавиатуры, отображает выходной сигнал на ЖК-дисплее и управляет реле, которое включает и выключает микроволновый генератор.
- Микроконтроллер часто бывает маленьким и дешевым . Компоненты выбираются так, чтобы минимизировать размер и быть как можно более дешевыми.
- Микроконтроллер часто, но не всегда, — это с повышенной степенью защиты . Например, микроконтроллер, управляющий двигателем автомобиля, должен работать при экстремальных температурах, с которыми обычный компьютер обычно не может справиться.Микроконтроллер автомобиля на Аляске должен нормально работать при -30 градусов F (-34 C), в то время как тот же микроконтроллер в Неваде может работать при 120 градусах F (49 C). Когда вы добавляете тепло, выделяемое двигателем, температура в моторном отсеке может подняться до 150 или 180 градусов F (65-80 C). С другой стороны, микроконтроллер, встроенный в видеомагнитофон, совсем не защищен.
Фактический процессор , , используемый для реализации микроконтроллера, может сильно различаться.Например, сотовый телефон, показанный на странице «Внутри цифрового сотового телефона», содержит процессор Z-80. Z-80 — это 8-битный микропроцессор, разработанный в 1970-х годах и первоначально использовавшийся в домашних компьютерах того времени. Мне сказали, что Garmin GPS, показанный в Как работают GPS-приемники, содержит маломощную версию Intel 80386. Изначально 80386 использовался в настольных компьютерах.
Во многих продуктах, таких как микроволновые печи, требования к ЦП довольно низкие, и цена является важным фактором.В этих случаях производители обращаются к выделенным микросхемам микроконтроллера — микросхемам, которые изначально были разработаны как недорогие, небольшие, маломощные встроенные процессоры. Motorola 6811 и Intel 8051 — хорошие примеры таких чипов. Существует также линейка популярных контроллеров под названием «микроконтроллеры PIC», созданная компанией Microchip. По сегодняшнему стандарту
.
Что такое ПЛК? Программируемый логический контроллер
Есть несколько ключевых функций, которые отличают ПЛК от промышленных ПК, микроконтроллеров и других промышленных решений управления:
• Ввод / вывод — ЦП ПЛК хранит и обрабатывает программные данные, но модули ввода и вывода подключают ПЛК к остальной части машина; именно эти модули ввода-вывода предоставляют информацию ЦП и запускают определенные результаты. Ввод / вывод может быть аналоговым или цифровым; устройства ввода могут включать датчики, переключатели и измерители, а выходы могут включать реле, лампы, клапаны и приводы.Пользователи могут смешивать и согласовывать ввод / вывод ПЛК, чтобы получить правильную конфигурацию для своего приложения.
• Связь. Помимо устройств ввода и вывода, ПЛК может также потребоваться подключение к другим типам систем; например, пользователи могут захотеть экспортировать данные приложений, записанные ПЛК, в систему диспетчерского управления и сбора данных (SCADA), которая контролирует несколько подключенных устройств. ПЛК предлагают ряд портов и протоколов связи, чтобы гарантировать, что ПЛК может взаимодействовать с этими другими системами.
• HMI — для взаимодействия с ПЛК в реальном времени пользователям нужен HMI, или человеко-машинный интерфейс. Эти операторские интерфейсы могут быть простыми дисплеями с текстовым считыванием и клавиатурой или большими сенсорными панелями, более похожими на бытовую электронику, но в любом случае они позволяют пользователям просматривать и вводить информацию в ПЛК в режиме реального времени.
В современном мире промышленного Интернета вещей (iIoT) и Индустрии 4.0 программируемые контроллеры призваны передавать данные через веб-браузер, подключаться к базам данных через SQL и даже к облачным данным через MQTT.
ПЛК «все в одном» объединяет контроллер с панелью HMI, создавая компактное и простое в использовании решение автоматизации. Пользователям больше не нужно устанавливать связь между ПЛК и панелью, и они могут программировать как релейно-контактную логику, так и дизайн HMI в единой программной среде. Комплексный подход экономит время, сокращает количество проводов и снижает затраты на приобретение нескольких устройств.
Программа для ПЛК обычно записывается на компьютер, а затем загружается в контроллер.
Большинство программ для программирования ПЛК предлагает программирование на языке релейной логики, или «C».Ladder Logic — традиционный язык программирования. Он имитирует принципиальные схемы с «ступенями» логики, читаемыми слева направо. Каждая ступень представляет собой определенное действие, управляемое ПЛК, начиная с входа или серии входов (контактов), которые приводят к выходу (катушке). Из-за своей визуальной природы лестничную логику проще реализовать, чем многие другие языки программирования.
Программирование на «C» — более поздняя инновация.
Некоторые производители ПЛК поставляют программное обеспечение для программирования управления.
В дополнение к традиционному ПЛК, описанному выше, существуют различные варианты, включая контроллеры ПЛК + HMI.
Unitronics теперь предлагает несколько линейок защищенных ПЛК для поддержки широкого диапазона системных требований. Компактная конструкция этих контроллеров, меняющих правила игры, дает немедленную экономию за счет устранения трудоемких задач, таких как подключение панели ПЛК и настройка связи. Unitronics поддерживает концепцию All-in-One с революционным программным обеспечением, которое позволяет программировать лестничное управление, проектирование HMI, а также всю конфигурацию оборудования и связи в единой простой программной среде.
,
AMCI: Advanced Micro Controls Inc :: Что такое ПЛК?
A ПРОГРАММИРУЕМЫЙ ЛОГИЧЕСКИЙ КОНТРОЛЛЕР (ПЛК) — это промышленная компьютерная система управления, которая постоянно отслеживает состояние устройств ввода и принимает решения на основе специальной программы для управления состоянием устройств вывода.
Практически любую производственную линию, функцию оборудования или процесс можно значительно улучшить с помощью этого типа системы управления. Однако самым большим преимуществом использования ПЛК является возможность изменять и воспроизводить операцию или процесс при сборе и передаче важной информации.
Еще одним преимуществом системы ПЛК является ее модульность. То есть вы можете смешивать и сопоставлять типы устройств ввода и вывода в соответствии с вашим приложением.
История ПЛК
Первые программируемые логические контроллеры были спроектированы и разработаны Modicon в качестве замены реле для GM и Landis.
- Эти контроллеры избавили от необходимости менять проводку и добавлять дополнительное оборудование для каждой новой конфигурации логики.
- Новая система радикально увеличила функциональность элементов управления, уменьшив при этом пространство шкафа, в котором размещалась логика.
- Первый ПЛК, модель 084, был изобретен Диком Морли в 1969 году.
- Первый коммерчески успешный ПЛК 184 был представлен в 1973 году и был разработан Майклом Гринбергом.
Что находится внутри ПЛК?
Центральный процессор, ЦП, содержит внутреннюю программу, которая сообщает ПЛК, как выполнять следующие функции:
- Выполнить инструкции по управлению, содержащиеся в пользовательских программах.Эта программа хранится в «энергонезависимой» памяти, что означает, что программа не будет потеряна при отключении питания.
- Обменивайтесь данными с другими устройствами, которые могут включать устройства ввода-вывода, устройства программирования, сети и даже другие ПЛК.
- Выполнение служебных операций, таких как связь, внутренняя диагностика и т. Д.
Как работает ПЛК?
В работе всех ПЛК есть четыре основных шага; Входное сканирование, сканирование программ, выходное сканирование и обслуживание.Эти шаги постоянно повторяются в цикле.
Четыре шага в операциях ПЛК
|
|
Какой язык программирования используется для программирования ПЛК?
Хотя язык релейной логики является наиболее часто используемым языком программирования ПЛК, он не единственный. В следующей таблице перечислены некоторые языки, которые используются для программирования ПЛК.
Релейная диаграмма (LD) Традиционная релейная логика — это графический язык программирования. Первоначально запрограммированное с помощью простых контактов, имитирующих размыкание и замыкание реле, программирование релейной логики было расширено за счет включения таких функций, как счетчики, таймеры, регистры сдвига и математические операции.
Функциональная блок-схема (FBD) — графический язык для изображения потоков сигналов и данных с помощью повторно используемых функциональных блоков. FBD очень полезен для выражения взаимосвязи алгоритмов и логики системы управления.
Структурированный текст (ST) — текстовый язык высокого уровня, поддерживающий структурированное программирование. Он имеет языковую структуру (синтаксис), которая очень напоминает PASCAL и поддерживает широкий спектр стандартных функций и операторов. Например;
| Если Speed1> 100.0, затем Flow_Rate: = 50.0 + Offset_A1; Иначе Flow_Rate: = 100.0; Steam: = ON End_If; |
Список инструкций (IL): низкоуровневый «похожий на ассемблер» язык, основанный на аналогичных языках списка инструкций, которые можно найти в широком диапазоне современных ПЛК.
LD | R1 СБРОС PRESS_1 MAX_PRESS LD 0 A_X43 |
Последовательная функциональная схема (SFC) Метод программирования сложных систем управления на более структурированном уровне.Программа SFC — это обзор системы управления, в которой основными строительными блоками являются целые программные файлы. Каждый программный файл создается с использованием одного из других типов языков программирования. Подход SFC координирует большие сложные задачи программирования на более мелкие, более управляемые задачи.
Что такое устройства ввода / вывода?
Что мне нужно учитывать при выборе ПЛК?
Сегодня на рынке представлено множество систем ПЛК.Помимо стоимости, вы должны учитывать следующее, решая, какой из них лучше всего соответствует потребностям вашего приложения.
- Будет ли система работать от постоянного или переменного напряжения?
- Достаточно ли памяти ПЛК для запуска моей пользовательской программы?
- Достаточно ли быстро работает система для удовлетворения требований моего приложения?
- Какой тип программного обеспечения используется для программирования ПЛК?
- Сможет ли ПЛК управлять количеством входов и выходов, которое требуется моему приложению?
- Может ли ПЛК обрабатывать аналоговые входы и выходы или комбинацию аналоговых и дискретных входов и выходов, если этого требует ваше приложение?
- Как я буду связываться с моим ПЛК?
- Требуется ли подключение к сети и можно ли его добавить в мой ПЛК?
- Будет ли система расположена в одном месте или на большой площади?
ПЛК Сокращения
В следующей таблице показан список часто используемых сокращений, которые вы видите при исследовании или использовании вашего ПЛК.
| ASCII | Американский стандартный код для обмена информацией |
| BCD | Десятичное двоичное кодирование |
| CSA | Канадская ассоциация стандартов |
| DIO | Распределенный ввод / вывод |
| EIA | Ассоциация электронной промышленности |
| EMI | Электромагнитные помехи |
| HMI | Человеко-машинный интерфейс |
| МЭК | Международная электротехническая комиссия |
| IEEE | Институт инженеров по электротехнике и радиоэлектронике |
| ввод / вывод | Вход (ы) и / или Выход (ы) |
| ISO | Международная организация по стандартизации |
| LL | Релейная логика |
| LSB | Младший бит |
| MMI | Интерфейс человек-машина |
| MODICON | Модульный цифровой контроллер |
| MSB | Самый старший бит |
| PID | Пропорциональная интегральная производная (управление с обратной связью) |
| РФ | Радиочастота |
| РИО | Удаленный ввод / вывод |
| RTU | Удаленный терминал |
| SCADA | Диспетчерский контроль и сбор данных |
| TCP / IP | Протокол управления передачей / Интернет-протокол |
фрагментов этого руководства, предоставленных www.modicon.com и www.searcheng.co.uk
Небольшое количество технологических компаний из США разрабатывает, производит и продает модули ПЛК. Advanced Micro Controls Inc (AMCI) — такая компания, специализирующаяся на интерфейсах определения положения и модулях управления движением.
.